





Abstract
In this paper, we present an explicit scheme for Ohmic dissipation with smoothed particle magnetohydrodynamics (SPMHD). We propose an SPH discretization of Ohmic dissipation and solve Ohmic dissipation part of induction equation with the super-time-stepping method (STS) which allows us to take a longer time step than Courant–Friedrich–Levy stability condition. Our scheme is second-order accurate in space and first-order accurate in time. Our numerical experiments show that optimal choice of the parameters of STS for Ohmic dissipation of SPMHD is νsts ∼ 0.01 and Nsts ∼ 5.
INTRODUCTION
Magnetic field plays an important role in various astrophysical problems. In star formation processes, magnetic field changes the formation and evolution of protostars, discs and jets (e.g. Machida, Tomisaka & Matsumoto 2004; Matsumoto & Tomisaka 2004; Matsumoto 2007; Inutsuka, Machida & Matsumoto 2010; Machida, Inutsuka & Matsumoto 2011). Until recently, these interesting phenomena in collapsing magnetized cloud core have been investigated with nested-grid code or adaptive-mesh-refinement code.
Smoothed particle hydrodynamics (SPH) is a suitable numerical scheme for the protostellar collapse simulations because of its adaptive nature at high-density region and several authors have investigated the formation and evolution of protostar and disc in molecular cloud core (e.g. Bate 1998; Stamatellos, Whitworth & Hubber 2011; Tsukamoto & Machida 2011, 2013). In spite of the importance of magnetic field, however, most of the simulations with SPH do not include a magnetic field because, until recently, robust magnetohydrodynamic (MHD) schemes for SPH had not been developed.
Recently, several authors proposed robust smoothed particle magnetohydrodynamics (SPMHD) schemes. Tricco & Price (2012) proposed an SPMHD scheme with the hyperbolic divergence cleaning method (Dedner et al. 2002), which is originally proposed by Price & Monaghan (2005). They improved the original method of Price & Monaghan (2005) by changing discretization forms for ∇ · B and ∇ϕ. With this method, they successfully simulated protostellar collapse and formation of jets (see, also Price, Tricco & Bate 2012).
Iwasaki & Inutsuka (2011) proposed an SPMHD scheme based on Godunov SPH (GSPH) proposed by Inutsuka (2002). We refer to their method as Godunov SPMHD (GSPMHD). Instead of the artificial dissipation terms which are used in Price & Monaghan (2005), they use a solution of a non-linear Riemann problem with magnetic pressure and the method of characteristics to calculate the interactions between SPH particles. This method significantly reduces the numerical diffusion (compare fig. 2 of Iwasaki & Inutsuka 2011 and fig. 6 of Price & Monaghan 2005). They also have developed hyperbolic divergence cleaning method for GSPMHD (Iwasaki & Inutsuka, in preparation) and successfully simulated formation of jets (Iwasaki, in preparation).
In the previous studies about star formation processes with SPMHD, ideal MHD was assumed. But the assumption of ideality is generally not correct for the star formation processes because interstellar gas is partially ionized and several magnetic diffusion processes (e.g. Ohmic dissipation, Hall effect and ambipolar diffusion) play roles. Especially, Ohmic dissipation is effective at high- density region (ρ ≳ 10−12 g cm−3) and formation and evolution of circumstellar discs, protostars and jets are significantly affected by Ohmic dissipation (see, e.g. Machida, Inutsuka & Matsumoto 2006).
To investigate the magnetic field in the intracluster medium of galaxy clusters, SPMHD simulations with Ohmic dissipation were performed by Bonafede et al. (2011). But they only considered the spatially constant magnetic resistivity. This assumption is generally not verified for protostellar collapse simulations because the resistivity has large spatial variation according to the gas density and temperature. Therefore, an Ohmic dissipation scheme for SPMHD which includes the effect of the spatially varying resistivity is desired to investigate formation and evolution of protostars, discs and jets.
In this paper, we propose a new explicit scheme for Ohmic dissipation with SPMHD. In Section 2, we describe our SPH discretization for Ohmic dissipation and time-stepping method. We present the results of several numerical tests in Section 3. Finally, we summarize our results in Section 4.
EXPLICIT SCHEME
Discretization
Time-stepping
NUMERICAL TESTS
Sinusoidal diffusion problem
Fig. 1 shows the L1 norms as a function of time step. We show both results of Euler method (solid) and STS (dashed). The horizontal axis is Δtexp for the Euler method and |$\bar{\tau }$| for STS. Here, |$\bar{\tau }$| is defined as |$\bar{\tau }=\sum _j^{N_{{\rm sts}}}\tau _j/N_{{\rm sts}}$|. The figure shows that both schemes scale linearly and are of first order in time. This figure also shows that the error of STS is slightly larger than the Euler method at the same Δt. This means that, with the same computational cost, the error of STS is slightly larger than the Euler method. This is simply because the error of STS is proportional not to τj but to ΔTsts.
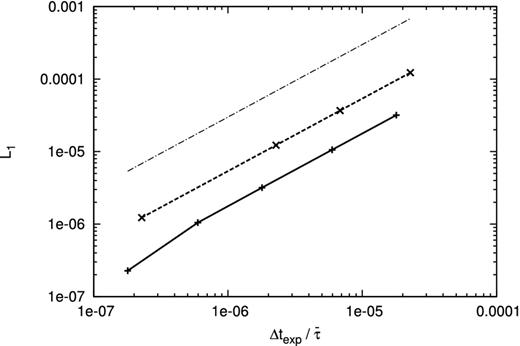
L1 norm of error as a function of time step for the sinusoidal diffusion problem. Horizontal axis is Δtexp for the Euler method and |$\bar{\tau }$| for STS. Solid line denotes the results with the Euler method and dashed line denotes the results with STS. The dash–dotted line is in proportion to Δt.
Fig. 2 shows the L1 norms as a function of smoothing length. The time step is fixed to be Δtexp = 1.5 × 10−6 and the Euler method is used. The figure shows that the error is proportional to h2 and it is confirmed that our discretization is of second order in space.
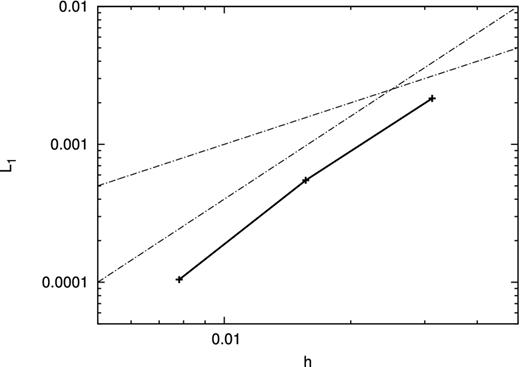
L1 norm of error as a function of smoothing length for the sinusoidal diffusion problem. Solid line denotes the results with the Euler method. The dash–dotted lines are in proportion to h and h2, respectively.
Gaussian diffusion problem
Fig. 3 shows the L1 norm as a function of time step at t = 8. Again, we considered both the Euler method (solid) and STS (dashed). The reference solution is the result with Ntot = 1282, Δtexp = 1.4 × 10−4 and the Euler method. The figure shows the same tendency of the results of sinusoidal diffusion problem, i.e. both schemes are of first order and the error of STS is slightly larger than the Euler method at the same time step.
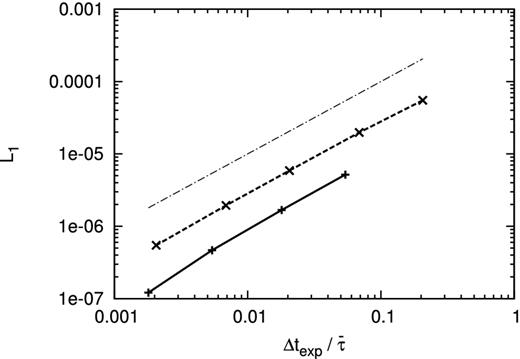
L1 norm of error as a function of time step for the Gaussian diffusion problem. Horizontal axis is Δtexp for the Euler method and |$\bar{\tau }$| for STS. Solid line denotes the results with the Euler method and dashed line denotes the results with STS. The dash–dotted line is in proportion to Δt.
To understand how the efficiency of STS depends on the parameters, we defined acceleration efficiency, F = ΔTsts/(NstsΔtexp) and plotted it in Fig. 4 with νsts = 10−2, 10−3, 10−4. The figure shows that the maximum of acceleration efficiency is determined by given νsts and the maximum value is |$F_{\text{max}}=1/\sqrt{\nu _{{\rm sts}}}$|. Therefore, small νsts is preferable for the acceleration. But the small νsts makes the scheme unstable. This figure also shows the efficiency saturates around |$N_{{\rm sts}}\sim 1/\sqrt{\nu _{{\rm sts}}}$|. Therefore, optimal choice of Nsts is |$\sim 1/\sqrt{\nu _{{\rm sts}}}$|.
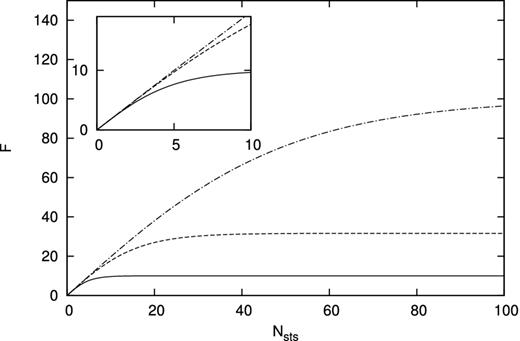
The acceleration efficiency, F = ΔTsts/(NstsΔtexp), as a function of Nsts for the case with νsts = 10−2 (solid), 10−3 (dashed), 10−4 (dash–dotted).
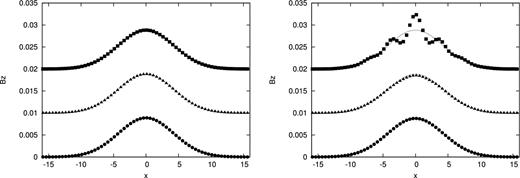
Profile of Bz at y = 0 plane at t = 8 of Gaussian diffusion problem. Circles, triangles, rectangles denote the results with νsts = 10−2, 10−3, 10−4, respectively. Left- and right-hand panels show the results with Nsts = 5 and Nsts = 10, respectively. The dashed line denotes the exact solution at t = 8. Each solution is offset from each other by 0.01 in the vertical direction to make the results more visible.
A test with spatially varying resistivity
Fig. 6 shows the contour maps of Bx and Bz obtained at t = 1 with the Euler method with Δtexp = 10−3 and STS with CCFL = 0.3, νsts = 0.01, Nsts = 5. The particle number of each direction is 48. The results are consistent with each other and also consistent with the results calculated with the grid-code (see, Matsumoto 2011). But the Bz around the centre is slightly overestimated with STS.
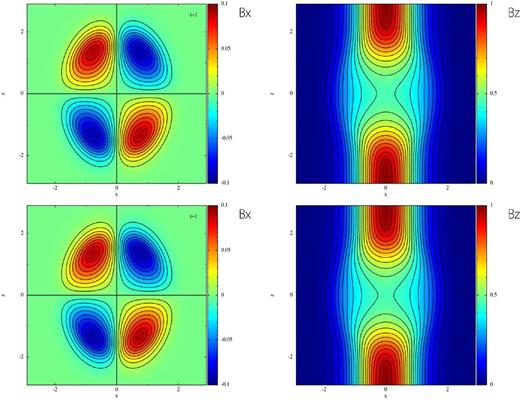
Magnetic field distributions of the 3D diffusion problem with spatially varying resistivity at t = 1. y = 0 planes are shown. The magnetic field is solved with the Euler method and Δtexp = 10−3 for top panels and with STS and CCFL = 0.3, νsts = 0.01, Nsts = 5 for bottom panels. Left-hand panels show Bx and contour levels are Bx = −0.09, −0.08, …, 0.09. Right-hand panels show Bz and contour levels are Bz = 0.05, 0.1, …, 0.95.
To confirm that our discretization is of second order in space with the spatially varying resistivity, we show the L1 norm of Bz at t = 1 as a function of smoothing length in Fig. 7. The solutions are obtained with the Euler method and Δtexp = 10−3. The reference solution is the result with Ntot = 963 and Δtexp = 10−3.
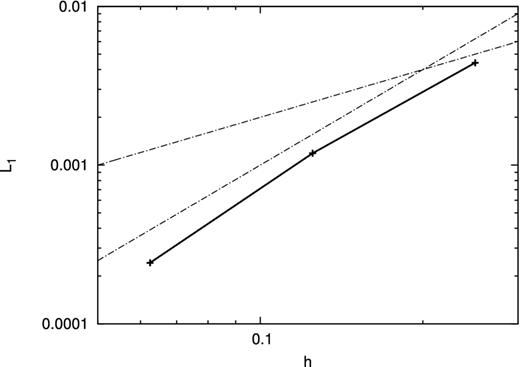
L1 norm of error as a function of smoothing length for the 3D diffusion problem with spatially varying resistivity at t = 1. Solid line denotes the results with the Euler method and Δtexp = 10−3. The dash–dotted lines are in proportion to h and h2, respectively.
This figure shows that the error is proportional to h2 and it is confirmed that our discretization is of second order in space.
Gravitational collapse of magnetized cloud core
Finally, we consider the gravitational collapse of magnetized cloud core. The initial condition is as follows. The initial molecular cloud core has a mass of 1 M⊙ and radius Rc = 2.7 × 104 au. The free-fall time of the core is 2.4 × 104 yr. The core is rigidly rotating with the angular velocity of Ω = 1.8 × 10−13 s−1. For the boundary condition, we fix the particles whose radius is larger than 2.6 × 104 au.
In Fig. 8, the magnetic energy of the central part (the region of ρ > 0.1ρc, where ρc is the central or maximum density of the cloud core) normalized by the thermal energy as a function of central density is shown. The solid line and crosses show the results with the STS and Euler methods, respectively. The result of ideal MHD is also shown with the dashed line for comparison. The parameters for STS are νsts = 0.01, Nsts = 5.
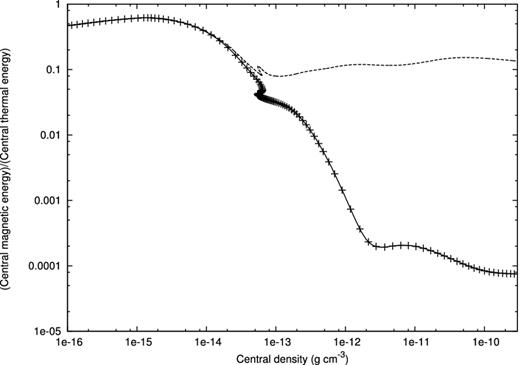
Central magnetic energy as a function of central density. The magnetic energy is normalized by the central thermal energy. Solid line and crosses denote the results of the resistive MHD model with the STS and Euler methods, respectively. The dashed line denotes the result of the ideal MHD model.
When the central density is small (10−16 < ρc < 10−14 g cm−3), Ohmic dissipation is ineffective and there is no difference between resistive and ideal MHD models. The magnetic energy of the resistive MHD models begins to decrease at ρc ∼ 10−13 g cm−3 and becomes more than three orders of magnitude smaller than the ideal MHD model at ρc = 10−10 g cm−3. This figure also shows that the result with STS agree very well with that of the Euler method. Therefore, STS is proved to be beneficial for the realistic star formation problems.
In Fig. 9, the density distributions at the centre of the cloud when ρc ∼ 5 × 10−3 g cm−3 are shown, The velocity field is shown with red arrows.

Density distributions at the centre of the cloud of ideal MHD model (left) and resistive MHD model (right) when ρc ∼ 5 × 10−3 g cm−3. y = 0 planes are shown. The right-hand panel shows the result with STS. The parameters for STS are νsts = 0.01, Nsts = 5. The velocity field is shown with red arrows. The thin black lines show the density contour and the thick black line in left-hand panel shows the contour of |vz| = 0.
In the ideal MHD model (left), the black thick line denotes the velocity contour of |vz| = 0. This line clearly shows that the outflow forms at the centre of the cloud. On the other hand, in the resistive MHD model (right), the outflow does not form because of the large resistivity in the first core. The structure of the first core is also very different from the ideal MHD model because the magnetic braking is ineffective. The detailed simulations and analysis of the formation and evolution of the outflow with ideal GSPMHD can be found in Iwasaki (in preparation).
SUMMARY AND PERSPECTIVE
In this paper, we presented an explicit scheme for Ohmic dissipation with SPMHD. We proposed a SPH discretization of Ohmic dissipation term in the induction equation. Ohmic dissipation part is solved with STS which relaxes the CFL stability condition requiring the numerical stability not at the end of each time step but at the end of a cycle of Nsts steps. Our scheme is second-order accurate in space and first-order accurate in time. The scheme successfully solves 2D and 3D tests. Our scheme is simple and can be easily implemented to any SPMHD codes.
We showed that STS introduces slightly larger error compared to the Euler method if we fix the computational costs. This comes from the fact that the error of STS is proportional not to τ but to ΔTsts.
We found that optimal choice of the parameters of STS for Ohmic dissipation of SPMHD is νsts ∼ 0.01 and Nsts ∼ 5 and these values are consistent with the values suggested by Tomida et al. (2013).
Our present scheme is only first-order accurate in time. Recently, Meyer, Balsara & Aslam (2012) suggest a method which extends STS to second-order accurate in time. They applied this method to solve thermal conductivity. It is possible to solve Ohmic dissipation or other magnetic diffusion with their method. Note that, however, the efficiency of acceleration of their method is not so good as first-order STS at small Nsts and large Nsts is required to achieve better acceleration. We plan to improve accuracy in time of our scheme in future works.
We thank T. Matsumoto, M. N. Machida and T. Inoue for fruitful discussions. We also thank the referee, D. Price, for helpful comments. The snapshots were produced by splash (Price 2007). The computations were performed on XC30 system at CfCA of NAOJ and SR16000 at YITP in Kyoto University. YT and KI are financially supported by Research Fellowships of JSPS for Young Scientists.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}