





Abstract
In a standard theory of the formation of the planets in our Solar System, terrestrial planets and cores of gas giants are formed through accretion of kilometer-sized objects (planetesimals) in a protoplanetary disk. Gravitational N-body simulations of a disk system made up of numerous planetesimals are the most direct way to study the accretion process. However, the use of N-body simulations has been limited to idealized models (e.g., perfect accretion) and/or narrow spatial ranges in the radial direction, due to the limited number of simulation runs and particles available. We have developed new N-body simulation code equipped with a particle–particle particle–tree (P3T) scheme for studying the planetary system formation process: GPLUM. For each particle, GPLUM uses the fourth-order Hermite scheme to calculate gravitational interactions with particles within cut-off radii and the Barnes–Hut tree scheme for particles outside the cut-off radii. In existing implementations, P3T schemes use the same cut-off radius for all particles, making a simulation become slower when the mass range of the planetesimal population becomes wider. We have solved this problem by allowing each particle to have an appropriate cut-off radius depending on its mass, its distance from the central star, and the local velocity dispersion of planetesimals. In addition to achieving a significant speed-up, we have also improved the scalability of the code to reach a good strong-scaling performance up to 1024 cores in the case of N = 106.
1 Introduction
In the standard model of planetary system formation, planets are considered to form from planetesimals. While how (and whether) planetesimals form in a protoplanetary disk is still under debate, a standard scenario assumes that a protoplanetary disk was initially filled with numerous planetesimals and the evolution of the system through gravitational interactions among planetesimals is considered to realize the scenario described below.
Planetesimals coagulate and form runaway bodies within about 105 yr (e.g., Kokubo & Ida 1996). This is called the runaway phase, and is followed by the oligarchic phase (e.g., Kokubo & Ida 1998) in which the runaway bodies grow until they reach the isolation mass (e.g., Kokubo & Ida 2002). The isolation mass is the mass at which the runaway bodies consume the planetesimals in their neighborhood. The separation distance between runaway bodies is within 5–10 Hill radii. The isolation mass is ∼MMars in the terrestrial planet region. In the gas giant and ice giant regions, the isolation mass reaches several times ∼M⊕. Once the mass of a runaway body reaches the critical value, which is about 10 times the Earth mass, runaway gas accretion starts to form a giant planet, with the runaway body constituting the core of the planet (Mizuno et al. 1978; Mizuno 1980; Ikoma et al. 1998).
One limitation of this scenario is that it is based on a rather limited set of N-body simulations, with a low mass resolution and a narrow radial range. For example, Kokubo and Ida (2002) used particles with a minimum mass of 1023 g (corresponding to a ∼100 km-sized planetesimal), and a radial range of 0.5–1.5 au.
These limitations imply that our current understanding of the planetary system formation process is based on “local” physical models, in which we assume that the radial migration of seed planetesimals or protoplanets does not affect the formation process significantly. This assumption of locality is, however, clearly insufficient, especially when we recognize that some exoplanetary systems are clearly shaped by migration effects. Protoplanets and planets can shift their radial positions via at least three main mechanisms: Type I migration, planetesimal-driven migration, and interactions between planets. In order to model the planetesimal-driven migration of protoplanets, a mass resolution much higher than in previous N-body simulations is necessary (Minton & Levison 2014). When a protoplanet with a mass larger than typical planetesimals is formed, neighboring planetesimals are disturbed gravitationally. If the planetesimal population is not constructed with a good enough resolution, as in previous studies, the perturbation becomes random, making systematic radial migration artificially absent. To study the effects of migration, a simulation needs to involve a wide spatial range in the radial direction as well.
Both a high resolution and a large spatial extent are, however, computationally demanding. Almost all previous long-term (covering more than 104 yr) simulations have been performed with high-accuracy direct methods (Kokubo & Ida 1996, 1998), and some with acceleration by GRAPE hardware (e.g., Sugimoto et al. 1990; Makino et al. 1993, 2003). Since the calculation cost of the direct method is O(N2), where N is the number of particles, using more than 106 particles to realize a high resolution or a large spatial extent is impractical even with Japanese K computer or its successor, the Fugaku supercomputer, unless a new calculation scheme is introduced.
Oshino, Funato, and Makino (2011) developed a numerical algorithm which combines the fast Barnes–Hut tree method (Barnes & Hut 1986) and an accurate and efficient individual time step Hermite integrator (Aarseth 1963; Makino 1991) through Hamiltonian splitting. This algorithm is called the particle–particle–particle–tree, or P3T, algorithm.
Iwasawa et al. (2017) reported the implementation and performance of a parallel P3T algorithm developed using the FDPS framework (Iwasawa et al. 2016). FDPS is a general-purpose, high-performance library for particle simulations. Iwasawa et al. (2017) showed that P3T algorithm shows high performance even in simulations with large number of particle (N = 106) and wide radial range (1–11 au). Its performance scales reasonably well for up to 512 cores for one million particles, but with one limitation. The cut-off length used to split the Hamiltonian is fixed and shared by all the particles. Thus, when the mass range of the particles becomes large through the runaway growth, the calculation efficiency is reduced substantially. If we take into account the collisional disruption of planetesimals, this problem becomes even more serious.
In this paper we report on the implementation and performance of the GPLUM code for large-scale N-body simulation of planetary system formation, based on a parallel P3T algorithm with individual mass-dependent cut-off length. We will show that the use of individual mass-dependent cut-off can speed up a calculation by a factor of 3–40.
In section 2 we describe the implementation of GPLUM. Section 3 is devoted to performance evaluation, and section 4 provides discussion and conclusion.
2 Numerical method
If the fourth-order Hermite scheme with individual time step (Aarseth 1963) is used, the order of the calculation cost becomes O(N2), where N is the number of particles. Hence, the cost of calculations increases significantly as N increases. Simulations using parallelized code on ther Japanese K computer (e.g., Kominami et al. 2016) could treat up to several times 105 particles. They used the Ninja algorithm (Nitadori et al. 2006) for parallelization of the Hermite scheme. On the other hand, in order to increase the number of particles that can be treated, the tree method (Barnes & Hut 1986) has been used at the expense of numerical accuracy. In order to improve both accuracy and speed, a scheme which combines the Barnes–Hut tree scheme and the high-order Hermite scheme (P3T) with individual time step has been developed. We incorporate this P3T scheme into our code.
In this section we describe the concept and the implementation of our code, GPLUM.
2.1 Basic equations
2.1.1 The P3T scheme
Since the changeover function becomes unity when rij > rout, gravitational interactions of the hard part work only between particles within the outer cut-off radius. We call particles within the outer cut-off radius “neighbors.” Hence, to integrate the hard part, it is sufficient to consider clusters composed of neighboring particles, which we call “neighbor clusters.” We will explain the procedure of time integration and the definition of neighbors and neighbor clusters in subsection 2.2.
The P3T scheme adopts the concept of the leapfrog scheme. An image of the procedures of the P3T scheme is shown in figure 1. In the leapfrog scheme, the Hamiltonian is split into free motion and gravitational interactions. In the mixed variable symplectic (MVS) scheme, it is split into Kepler motion and interactions between particles. In the P3T scheme, it is split into the hard part and the soft part. The hard part consists of motion due to the central star and short-range interactions. The soft part consists of long-range interactions. Calculation of the gravitational interactions of the soft part is performed using the Barnes–Hut tree scheme (Barnes & Hut 1986) available in FDPS (Iwasawa et al. 2016). Time integration of the hard part is performed using the fourth-order Hermite scheme (Makino 1991) with the individual time step scheme (Aarseth 1963) for each neighbor cluster, or by solving the Kepler equation with Newton–Raphson iteration for particles without neighbors.
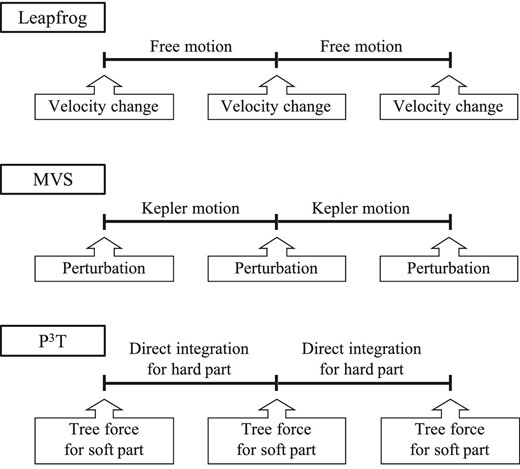
Procedures of the leapfrog (top), MVS (middle), and P3T schemes (bottom). Modified from figure 1 in Fujii et al. (2007).
Here we explain how we determine the (outer) cut-off radius rout. First, we explain the method used to determine the cut-off radius in previous P3T implementations such as PENTACLE. Our new method is explained in sub-subsections 2.1.2 and 2.1.3.
2.1.2 The P3T scheme with individual cut-off
Particles can have different cut-off radii. In our new scheme, these different values are actually used for different particles.
The parameter |$\tilde{R}_{{\rm cut},0}$| should satisfy |$\tilde{R}_{\rm cut} \ge 1$| if we have to ensure that gravitational interactions with particles closer than the distance of the Hill radius are included in the hard part, or |$\gamma \tilde{R}_{\rm cut} \ge 1$| if we have to ensure that the whole of the gravitational force exerted by particles closer than the Hill radius is calculated in the hard part. Using the individual cut-off method, we have made it possible to split gravitational interactions efficiently, and to make |$\tilde{R}_{{\rm cut},0}$| relatively large (|$\tilde{R}_{{\rm cut},0}\gtrsim 1$|) without reducing the simulation speed. This method requires some complex procedures when two particles with different cut-off radii collide and merge. We will explain the detail of this procedure in subsection 2.4.
2.1.3 The P3T scheme with Hill radius and random velocity dependent cut-off
The cut-off radius should be chosen so that it is sufficiently larger than vranΔt, where vran is the random velocity of particles and Δt is the time step for the soft part. The time step should be sufficiently shorter than the time for the particles to move a distance equivalent to their cut-off radii.
The parameter Rcut, 1 should be determined so that it satisfies Rcut, 1 ≥ 1 in order to let the cut-off radius be sufficiently larger than the product of the random velocity and the time step. We usually use Rcut, 1 = 8.
2.2 Data structure and time-integration procedure
In GPLUM, the data structure for particles, which we call for the soft part, is created using a function in FDPS. The simulation domain is divided into subdomains, each of which is assigned to one MPI process. Each MPI process stores the data of the particles which belong to its subdomain. We call this system of particles the soft system. A particle in the soft system is expressed in a C++ class, which contains as data the index number, mass, position, velocity, acceleration, jerk, time, time step for the hard part, and the number of neighbors. The acceleration of each particle is split into the soft and hard parts using equations (5) and (6) respectively. The jerk of each particle is calculated only for the acceleration of the hard part since jerk is not used in the soft part. Neighbors of the ith particle are defined as particles which exert hard-part force on the ith particle. The definition of neighbors and the process of creating a neighbor list are explained in subsection 2.3.
For each time step of the soft part, another set of particles is created for the time integration of the hard part. We call this secondary set of particles the hard system. The data of the particles are copied from the soft system to the hard system. A particle in the hard system has second- and third-order time derivatives of the acceleration and the neighbor list, in addition to the data copied from the soft system. These “hard particles” are split into smaller particle clusters, called “neighbor clusters.” Neighbor clusters are created so that, for any member of one cluster, all its neighbors are also members of that cluster. The definition of neighbor clusters and the process of creating neighbor clusters are explained in subsection 2.3. Time integration of the hard part can be performed for each neighbor cluster independently since each hard particle interacts only with particles in its neighbor cluster.
The simulation in GPLUM proceeds as follows (see figure 1):
The soft system is created. The index, mass, position, and velocity of each particle are set from the initial conditions.
Data of the soft system is sent to FDPS. FDPS calculates the gravitational interactions of the soft part, and returns the acceleration of the soft part, aSoft. The neighbor list of each particle is created.
The first velocity kick for the soft part is given, which means that aSoftΔt/2 is added to the velocity of each particle, where Δt is the time step of the soft part.
The neighbor clusters are created. If there are neighbor clusters of particles stored in multiple MPI processes, the data for particles contained by it are sent to one MPI process (see subsection 2.3). The data of particles are copied from the soft system to the hard system.
The time integration of the hard system is performed using OpenMP and MPI parallelization.
The time integration of each neighbor cluster is performed using the fourth-order Hermite scheme. If a particle collision takes place, the procedure for the collision is carried out (see subsection 2.4).
The time integration of each particle without neighbors is performed by solving the Kepler equation.
The data of particles are copied from the hard system to the soft system. If there are newly born fragments, they are added to the soft system.
The data of the soft system is sent to FDPS. FDPS returns the acceleration of the soft part, aSoft, in the same way as in step 2. The neighbor list for each particle is created again.
The second velocity kick for the soft part is given in the same way as in step 3.
If collisions of particles take place in this time step, the colliding particles are merged and the cut-off radius and the acceleration of the soft part of all particles are recalculated.
Go back to step 3.
2.3 Neighbor cluster creation procedure
A neighbor list is a list of the indices defined for each particle so that the ith particle’s neighbor list contains the particle indices of the ith particle’s neighbors. Here, the ith particle’s neighbors are defined as the particles which are within the cut-off radius the ith particle during the time step of the soft part. Numerically, the ith particle’s neighbors are defined as the particles within the “search radius.”
After the neighbor lists of all particles are created, the particles are divided into neighbor clusters so that for all particles in a cluster, all of its neighbors are in the same cluster.
In order to determine a neighbor cluster, a “cluster index” is set for each particle using the following steps:
Initially, the cluster index of each particle is set to be the index of the particle (i.e., i for the ith particle).
The cluster index of a particle is set to the minimum of the cluster indices of all its neighbors and itself.
Step ii is repeated until the cluster index of all neighbors and itself become equal.
Particles with the same cluster index belong to the same neighbor cluster.
If there are neighbor clusters with members from more than one MPI process (such as the clusters of blue, cyan, light green, and purple particles in figure 2), the data for particles which belong to such clusters have to be sent to one MPI process so that they can be integrated without the need for communication between MPI processes. Here we explain the procedure to determine the MPI process to which the particle data is sent for each neighbor cluster with members from more than one MPI process. Some particles have neighbors from an MPI process different from their own. Here we call neighbors stored in a different MPI process “exo-neighbors.” The set of rank numbers of MPI processes of neighbors including itself for the ith particle is Ri. For each particle with exo-neighbors, the procedure to construct the neighbor cluster is as follows:
For each particle with exo-neighbors, the cluster index and Ri are exchanged with exo-neighbors of that particle. Then, the cluster index number is set to be the minimum value of the cluster index numbers of all its exo-neighbors and itself, and Ri is updated to the union of Rj of all its exo-neighbors and its Ri.
 Fig. 2.
Fig. 2.Illustration of particle system and neighbor cluster. The dots represent particles and the lines connecting particles represent that the connected particles are neighbor pairs. Particles of the same color belong to the same neighbor cluster (except for the gray particles), and gray particles are isolated particles. Each divided area represents the area allocated to each MPI process for FDPS (left) and for time integration of the hard part (right). (Color online)
Step A is repeated until the cluster index of all exo-neighbors and itself become equal, and the Rj of all its exo-neighbors and its Ri become equal.
After this procedure, for each neighbor cluster, the time integration will be done on the MPI process which has the minimum rank in Ri. Thus, particle data are sent to that MPI process.
Figures 2 and 3 illustrate these procedures. In the state shown in the left panel of figure 2, the neighbor clusters of blue, cyan, light green, and purple particles span over multiple MPI processes. In order to integrate the hard part of each neighbor cluster in one MPI process, the allocation of neighbor clusters to each MPI process should be like the right panel of figure 2. Consider the neighbor cluster of particles a to g in figure 2. Here we assume that a < b < c < d < e < f < g and i < j < k < l. In this case, after repeating step A three times, particles a to g all have a as their cluster index number and {i, j, k, l} as Ri. Therefore, data for particles c to g are sent to MPI process i, and MPI process i receives data from the rank j to k MPI processes.
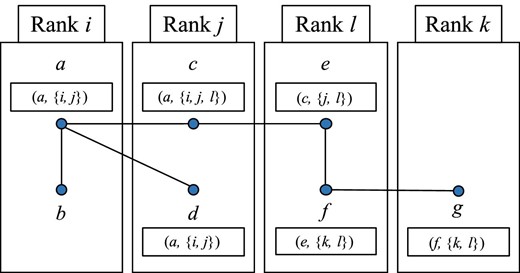
Illustration of neighbor clusters of particles a to g in figure 2 before step A. Here, a to g are the index numbers of each particle, assuming that a < b < c < d < e < f < g. The value in the square under the index number indicates (cluster index number, Ri) the number the particle has before step A. (Color online)
Note that our procedure described above is designed to produce no single bottleneck and achieve reasonable load balancing between processes. The communication to construct the neighbor clusters is limited to point-to-point communications between neighboring processes (no global communication), and the time integration is also distributed to many MPI processes.
2.4 Treatment of collisions
2.4.1 Perfect accretion model
Here we explain the procedure for handling collisions for the case of the perfect accretion model.
2.4.2 Implementation of fragmentation
First, we describe how the fragmentation process is treated in the code. The procedure for particle collision with fragmentation is similar to the case of the perfect accretion. When a collision occurs, remnant and fragment particles are created. The number and masses of the remnant and fragments are determined using the fragmentation model.
In GPLUM, as in the case of perfect accretion, mass originating from the ith and jth particles is considered as separate particles until the end of the hard integration steps. We assume that the total mass of the fragments is smaller than the mass of the smaller of the two collision participants. Therefore, we assume that fragments adopt the cut-off radius of the smaller collision participants, and the remnant will be composed of the larger participant and the rest of the mass of the smaller participant.
2.4.3 Fragmentation models
In this section we describe the fragmentation models implemented in GPLUM. Currently, two models are available. One is a very simplified model, which has the advantage that we can study the effect of changing the collision product. The other is a model that can adjust the number of fragments by collision angle and relative velocity based on Chambers (2013), which determines the collision outcome using the result of smooth-particle hydrodynamic collision experimentation. In this model, the collision scenario, which includes accretion, fragmentation, and hit-and-run, is also determied by collision angle and relative velocity. Since the latter is given in Chambers (2013), in the following we describe the simple model only.
The energy dissipation in the hard part due to the collision can be calculated in the same manner as for perfect accretion.
3 Result
3.1 Initial conditions and simulation parameters
In this section we present the initial models, parameters, and computing resources and parallelization method used.
We use η = 0.01 for the accuracy parameter for the fourth-order Hermite scheme. For the initial step, and also for the first step after a collision, we use η0 = 0.1η. We set |$\tilde{R}_{\rm search0}=1.1$|, |$\tilde{R}_{\rm search1}=6$|, |$\tilde{R}_{\rm search2}=2$|, and |$\tilde{R}_{\rm search3}=2$| [see equations (17)]. For the accuracy parameter of the Barnes–Hut algorithm we use the opening angle of θ = 0.1 and 0.5. The system of units is that solar mass, the astronomical unit, and the gravitational constant are all unity. In these units, 1 yr corresponds to 2π time units.
The calculations in this paper were carried out on a Cray XC50 system at the Center for Computational Astrophysics (CfCA) of the National Astronomical Observatory of Japan (NAOJ). This system consists of 1005 computer nodes, and each node has Intel Xeon Skylake 6148 (40 cores, 2.4 GHz) processors. We used MPI over up to 208 processors. Unless otherwize noted, OpenMP over five threads and the AVX512 instruction set were used. Some of the calculations were done on on a Cray XC40 system at the Academic Center for Computing and Media Studies (ACCMS) of Kyoto University. This system consists of 1800 computer nodes, and each node has Intel Xeon Phi KNL (68 cores, 1.4 GHz) processors. We used MPI over 272 processes, OpenMP of four threads per process, and the AVX2 instruction set in this system.
We used FDPS version 5.0d (Iwasawa et al. 2016) with the performance enhancement for the exchange of the local essential tree (Iwasawa et al. 2019).
3.2 Accuracy and performance
In sub-subsection 3.2.1 we present the measured accuracy and performance for the case of equal-mass particles, and in sub-subsection 3.2.2 that for systems with a mass spectrum. Finally, in sub-subsection 3.2.3 we present the result of long-term calculations.
3.2.1 Equal-mass systems
In this sub-subsection we present the results of calculations with equal-mass initial models. We use the enhancement factor for particle radius of f = 1. Figure 4 shows the maximum energy error over 10 Keplerian orbits as a function of Δt and |$\Delta t/\tilde{R}_{\rm cut,0}$|. The energy error here is the relative error of the total energy of the system, with corrections for dissipations due to accretion and gas drag when it is included. We have changed the opening angle θ and the cutoff radius |$\tilde{R}_{\rm cut,0}$|. We used individual cut-off in the standard simulation in this section. In narrow-range simulations, the individual cut-off radii are almost the same as the shared cut-off radius since the particle masses are equal.
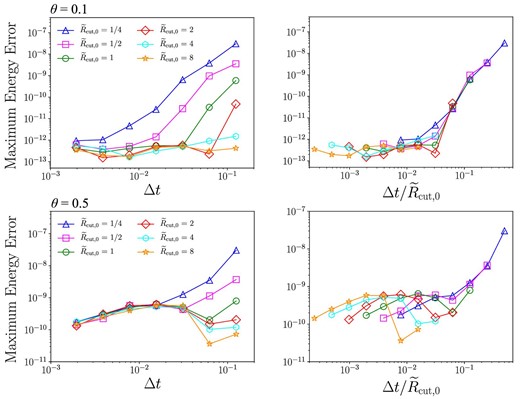
Maximum energy error over 10 Keplerian orbits as functions of Δt (left) and |$\Delta t/\tilde{R}_{\rm cut}$| (right) in the case of θ = 0.1 (top) and θ = 0.5 (bottom). (Color online)
For the case of θ = 0.1, the energy error is determined by |$\Delta t/\tilde{R}_{\rm cut,0}$|, and not by the actual value of Δt, as in Iwasawa et al. (2017). The rms value of the random velocity is 2h. Therefore, Δt must be smaller than |$\tilde{R}_{\rm cut,0}$| in order to resolve the changeover function, and that is the reason why the error is determined by |$\Delta t/\tilde{R}_{\rm cut,0}$|. With |$\Delta t/\tilde{R}_{\rm cut,0}< 0.03$|, the integration error reaches the round-off limit of 10−12.
In the case of a larger opening angle, θ = 0.5, the limiting error is around 10−10. This is simply because the acceleration error of the soft part is larger than that for θ = 0.1. Since the cut-off radius and the change of distance due to the relative motion between particles in one step are approximately proportional to |$\tilde{R}_{\rm cut,0}$| and Δt, respectively, it is considered that the energy error is determined by |$\Delta t/\tilde{R}_{\rm cut,0}$|. The reason why the energy error becomes small as |$\tilde{R}_{\rm cut,0}$| and Δt are large when |$\Delta t/\tilde{R}_{\rm cut,0}$| is small could be because the cut-off radius becomes large with |$\tilde{R}_{\rm cut,0}$| and Δt.
Figure 5 shows the maximum energy error over 10 Keplerian orbits as a function of Δt and |$\Delta t/\tilde{R}_{\rm cut,0}$| in a wide-range simulation. The Keperian orbit in this simulation means that of the inner edge. Only the points where the calculation was completed within 30 min are plotted. It shows that the energy error in the case of individual cut-off in a wide-range simulation is not too different from the case of shared cut-off if we use |$\Delta t/\tilde{R}_{\rm cut,0}\lesssim 0.1$|.
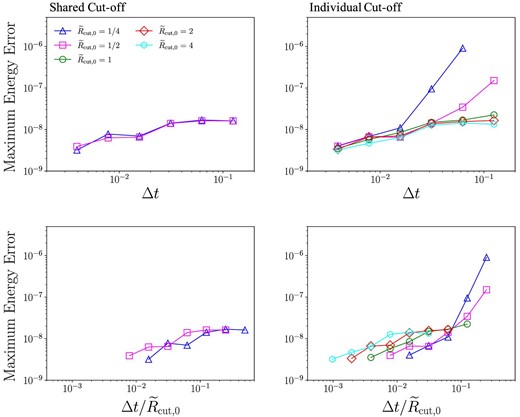
Maximum energy error over 10 Keplerian orbits as functions of Δt (left) and |$\Delta t/\tilde{R}_{\rm cut}$| (right) in the case of θ = 0.5, shared cut-off (left), and individual cut-off (right) in a wide-range simulation. (Color online)
Figure 6 shows the wallclock time for the integration over one Kepler time and its breakdown as a function of the number of CPU cores for the case of θ = 0.5, Δt = 1/64, and |$\tilde{R}_{\rm cut,0}=2$|. We used five cores per MPI process. The wallclock time is the average over ten Kepler times. We can see that the parallel performance speed-up is reasonable for up to 320 cores (N = 1.25 × 105) and more than 1040 cores (N = 106).
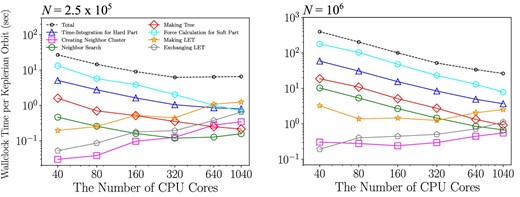
Wallclock time taken for each procedure per Keplerian orbit as a function of the number of CPU cores in the cases of 1.25 × 105 (left) and 106 (right) particles. We used θ = 0.5, Δt = 1/64, and |$\tilde{R}_{\rm cut}=2$|. We used five-thread parallelization (i.e., the number of MPI processes is 1/5 of the number of CPU cores). (Color online)
We can see that the times for the soft force calculation, hard part integration, and tree construction all decrease as we increase the number of cores, for both N = 1.25 × 105 and 106. On the other hand, the times for LET construction, LET communication (exchanging LET), and creation of the neighbor clusters increase as we increase the number of cores, and the time for LET construction currently limits the parallel speedup. LET means local essential tree in FDPS, defined by Iwasawa et al. (2016). This increase in the cost of LET construction occurs because the domain decomposition scheme used in FDPS can result in suboptimal domains for the case of rings; a simple solution for this problem is to use cylindrical coordinates (Iwasawa et al. 2019) when the ring is relatively narrow. On the other hand, When the radial range is very wide, the simple strategy used in Iwasawa et al. (2019) cannot be used. We will need some better solution for this problem.
Figure 7 shows the wallclock time for 640 cores, but with different numbers of threads per MPI process. The other parameters are the same as in figure 6. We can see that the total time is a minimum for four threads per process for the case of N = 1.25 × 105, but at one thread per process for N = 106. This difference again comes from the costs of the construction and communication of LETs. With the current domain decomposition scheme, these costs contain terms proportional to the number of MPI processes, and thus for small N and large numbers of MPI processes these costs can dominate the total cost. Thus, for small N, a combination of OpenMP and MPI tends to give better performance compared to flat MPI.
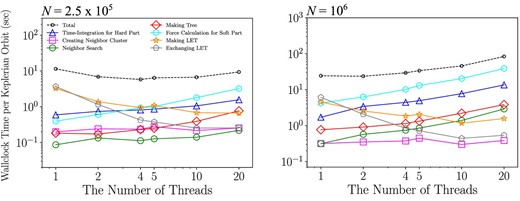
Wallclock time taken for each procedure per Keplerian orbit as a function of the number of MPI processes per node in the cases of 1.25 × 105 (left) and 106 (right) particles. We used θ = 0.5, Δt = 1/64, |$\tilde{R}_{\rm cut}=2$|, and 640 CPU cores (i.e., the number of MPI processes is 640 divided by the number of threads). (Color online)
3.2.2 Systems with mass spectrum
In this section we present the results of calculations with particles with a mass spectrum in order to evaluate the behavior of GPLUM at the late stage of planetary formation. As the initial model we used the output snapshot at 9998 years of integration from the initial model described in the previous section. The minimum, average, and maximum masses are 2.00 × 1021, 5.30 × 1021, and 8.46 × 1024 g, respectively. The number of particles is 377740. We used the enhancement factor for particle radius of f = 1.
Figure 8 shows the maximum energy error over 10 Kepler times as a function of |$\Delta t/\tilde{R}_{\rm cut,0}$| and Δt in the case of shared, individual, and individual and random velocity cut-off schemes. Here, θ = 0.1. If we compare the values of |$\Delta t/\tilde{R}_{\rm cut,0}$| itself, it seems the individual cut-off scheme requires a rather small value of Δt, but when the term for the random velocity is included, we can see that the energy error is essentially independent of |$\tilde{R}_{\rm cut,0}$|. Since the energy error, which depends on |$\Delta t/\tilde{R}_{\rm cut,0}$| when |$\Delta t/\tilde{R}_{\rm cut,0}\gtrsim 10^{-2}$| in the shared and individual cut-off schemes, does not appear when the random velocity cut-off scheme is used, this error seems to cause the cut-off radius to not be set sufficiently larger than vranΔt. The energy error almost does not depend on Δt and |$\tilde{R}_{\rm cut,0}$| in the case of the random velocity cut-off scheme. Therefore, we can use larger Δt and smaller |$\tilde{R}_{\rm cut,0}$| to reduce the time of simulation while maintaining accuracy.
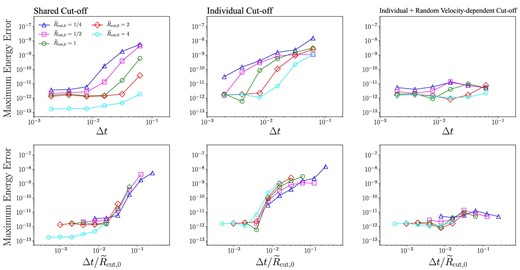
Maximum energy error over five Keplerian orbits as a function of |$\Delta t/\tilde{R}_{\rm cut,0}$| (top) and Δt (bottom) in the case of θ = 0.1, shared cut-off (left), individual cut-off (center), and individual and random velocity-dependent cut-off (right). (Color online)
Figure 9 shows the wallclock time for the integration over one Kepler time and its breakdown as a function of |$\tilde{R}_{\rm cut,0}$| in the case of θ = 0.5, Δt = 1/64. In the case of the shared cut-off scheme, the calculation cost increases quickly as we increase |$\tilde{R}_{\rm cut,0}$|. On the other hand, from figure 8 we can see that for Δt = 1/64, we need |$\tilde{R}_{\rm cut,0} \ge 1$| in the case of the shared cut-off scheme to achieve reasonable accuracy.
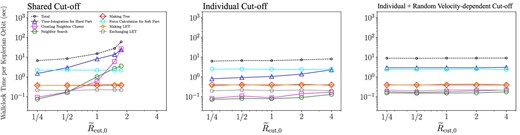
Wallclock time taken for simulations per Keplerian orbit as functions of |$\tilde{R}_{\rm cut}$| in the case of θ = 0.5, Δt = 1/64, shared cut-off (left), individual cut-off (center), and individual and random velocity-dependent cut-off (right). (Color online)
For individual cut-off schemes with and without the random velocity term, the total calculation cost is almost independent of |$\tilde{R}_{\rm cut,0}$|, and in the case of the scheme with the random velocity term, the total energy error is also well conserved for all values of |$\tilde{R}_{\rm cut,0}$|. Thus, we can see that individual cut-off schemes with a random velocity term are more efficient compared to the shared cut-off schemes for realistic distribution of particle mass and random velocity.
Figure 10 shows the average number of neighbors, 〈nb〉, and the number of particles in the largest neighbor cluster, nb, max, as functions of |$\tilde{R}_{\rm cut,0}$| in the case of θ = 0.5, Δt = 1/64. The average number of neighbors is roughly proportional to |$\tilde{R}_{\rm cut,0}^3$|, while almost independent of |$\tilde{R}_{\rm cut,0}^3$| for the case of the individual cut-off with random velocity term. This, of course, means that for most particles their neighbor is determined by the random velocity term, and only the neighbors of the most massive particles are affected by the individual term. This effect on the neighbors of the most massive particles is very important in maintaining high accuracy and high efficiency.

Average number of neighbors for each particle, 〈nb〉, (left) and the number of particles in the largest neighbor cluster, nb, max, (right) as functions of |$\tilde{R}_{\rm cut}$| in the case of θ = 0.5, Δt = 1/64. The dotted line in the left panel represents the slope of |$\langle n_b\rangle \propto \tilde{R}_{\rm cut,0}^3$|. (Color online)
3.2.3 Long-term simulations
In this section we present the result of long-term integration of up to 20000 yr. We included the gas drag according to the model in Adachi, Hayashi, and Nakazawa (1976) for the MMSN model, and we used the simple fragmentation model with a = 0.3, b = 0.1 in the case of the individual cut-off with random velocity term. We used parameters of θ = 0.5, Δt = 1/64, |$\tilde{R}_{\rm cut,0}=3$|, and f = 3. We had to stop the simulation with the shared time step since it had become too slow.
Figure 11 shows the energy error as a function of time. We can see that for the first 1000 yr all the schemes show similar behavior. However, the error of the run with the shared cut-off scheme starts to grow by 2000 yr, and then the calculation becomes too slow. The error of the run with the individual cut-off without the random velocity term also starts to grow by 6000 yr. When the random velocity term is included, the error remains small even after 20000 yr. In the case of shared cut-off, it is considered that the energy error due to random velocity appears earlier since the cut-off radius is larger.
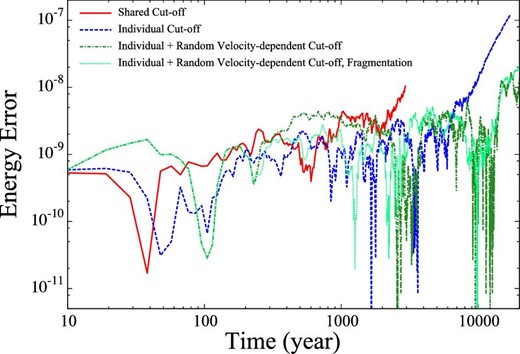
Evolution of energy error for long-term simulations in the case of θ = 0.5, Δt = 1/64, shared cut-off with perfect accretion (solid red), individual cut-off with perfect accretion (solid blue), individual and random velocity-dependent cut-off with perfect accretion (solid green), and individual and random velocity-dependent cut-off with fragmentation (dashed light green). (Color online)
Note that this result is for one particular choice of the accuracy parameters and it is possible to improve the error of, for example, the shared cut-off scheme by reducing the soft time step. On the other hand, the individual cut-off scheme with the random velocity term can keep the error small even after the most massive particle grows by three orders of magnitude in mass (see figure 13). Thus, we conclude that the the individual cut-off scheme with the random velocity term can be reliably used for long-term simulations.
Figure 12 shows the wallclock time as a function of simulation time. The increase of the calculation time of the shared cut-off scheme is faster than linear, while that of the individual cut-off schemes is slower, because of the decrease in the number of particles. At the time of the first snapshot (10 yr), because the mass of the largest body already reaches about nine times the initial mass, the mean cut-off radius in the case of shared cut-off is about twice as large as for individual cut-off. This is the reason why the calculation speed in the case of shared cut-off is slower than the individual case from the beginning of the simulation.
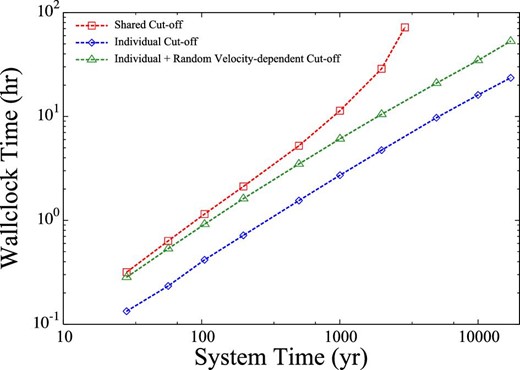
Wallclock time taken for long-term simulations until time t as a function of t in the case of shared cut-off (red) and individual cut-off (blue). (Color online)
Figure 13 shows the evolution of the number of particles and the mass of the most massive particle. We can see that the time evolutions obtained using different cut-off schemes are practically identical.
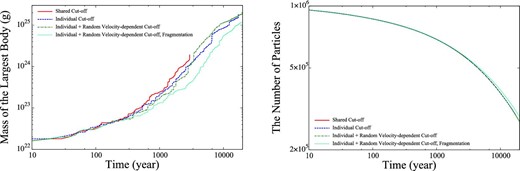
Evolution of number of particles (left) and mass of the largest body (right) for long-term simulations in the case of θ = 0.5, Δt = 1/64, shared cut-off with perfect accretion (solid red), individual cut-off with perfect accretion (solid blue), individual and random velocity-dependent cut-off with perfect accretion (solid green), and individual and random velocity-dependent cut-off with fragmentation (dashed light green). (Color online)
Figures 14 and 15 show the mass distributions and rms random velocities of particles at years 1499 and 2502. The result does not depend on the choice of the cut-off scheme. Thus, we can conclude that the choice of the cut-off scheme does not affect the dynamics of the system.
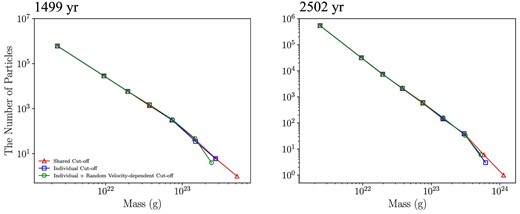
Mass distributions of particles in the case of shared cut-off (red) and individual cut-off (blue) with perfect accretion at 1499 yr (left) and 2502 yr (right). We plot the distribution at 2435 yr in the case of shared cut-off instead of at 2502 yr since the simulation was not performed until 2502 yr in that case. (Color online)

Distribution of rms of orbital eccentricities (top) and inclinations (bottom) of particles as a function of mass in the case of shared cut-off (red), individual cut-off (blue), and individual and random velocity-dependent cut-off with perfect accretion (green) with perfect accretion at 1499 yr (left) and 2502 yr (right). We plot the distribution at 2435 yr in the case of shared cut-off instead of 2502 yr since the simulation was not performed until 2502 yr in that case. The error bars show 70% confidence intervals.
Figure 16 shows the average number of neighbors, 〈nb〉, and the number of particles in the largest neighbor cluster, |$n_{b,\rm max}$|. Because the mass of the largest body already reaches about nine times the initial mass at 10 yr, the average number of neighbors in the case of shared cut-off is larger than in the case of individual cut-off from the beginning of the simulation. The average number of neighbors 〈nb〉 for the shared cut-off scheme increases with time, since the shared cut-off radius is determined by the mass of the most massive particle. On the other hand, that for individual cut-off, with and without the random velocity term, initially decreases partly because the total number of particles decreases due to collisions, and partly because of the increase in the inclination of particles. However, after around 5000 yr, 〈nb〉 for the scheme with random velocity term starts to increase due to the increase in the random velocity. This increase does not result in a notable increase in the calculation time, as can be seen in figure 12. This is simply because 〈nb〉 is still very small.
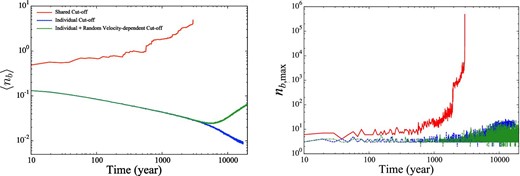
Evolution of the average number of neighbors for each particle, 〈nb〉, (left) and the number of particles in the largest neighbor cluster, nb, max, (right) in the case of shared cut-off (red), individual cut-off (blue), and individual and random velocity-dependent cut-off with perfect accretion (green).
In the case of the shared cut-off scheme, |$n_{b,\rm max}$| approached the total number of particles when the calculation was halted. This increase in the size of the cluster is of course the reason why the calculation became very slow. This means that the neighbor cluster showed percolation, which is expected to occur if 〈nb〉 is larger than the critical value of order unity. When percolation of the neighbor cluster occurs, our current implementation falls back to the O(N2) direct Hermite scheme on a single MPI process. Thus, it is necessary to avoid percolation, and that means we should keep 〈nb〉 ≪ 1.
4 Discussion and conclusion
We have presented the implementation and performance of GPLUM, parallel N-body simulation code based on the |$\rm P^3T$| scheme. The main difference from the previous implementation of the parallel |$\rm P^3T$| scheme (Iwasawa et al. 2017) is that we introduced an individual cut-off radius which depends both on the particle mass and the local velocity dispersion. The dependence on the mass is necessary to handle systems with a wide range of mass spectrum, and the the local velocity dispersion dependence is necessary to maintain accuracy when the velocity dispersion becomes high. With this new treatment of the cut-off radius, GPLUM can follow a planetary formation process in which the masses of the planetesimals grow by many orders of magnitude without a significant increase in the calculation time.
We have confirmed that the use of the individual cut-off has no effect on the result, and that accuracy is improved and the calculation time is shortened compared to the shared cut-off scheme.
The parallel performance of GPLUM is reasonable for up to 1000 cores. On the other hand, there are systems with much larger numbers of cores. In particular, the Fugaku supercompuer, which is currently the fastest computer in the world, has around eight million cores. In order to make efficient use of such machines, the scalability of GPLUM should be further improved.
Due to both the distribution of calculation and the increase of communication due to parallelization, there are optimum values for the numbers of parallel MPI and OpenMP. It should be noted that the optimum values differ depending on the system.
As discussed in sub-subsection 3.2.1, currently the limiting factor for the parallel performance is the time for LET construction, which can be reduced by several methods (Iwasawa et al. 2019). We plan to apply such methods and improve the parallel performance.
GPLUM is freely available for all those who are interested in particle simulations. The source code is hosted on the GitHub platform and can be downloaded from their site;1 it has the MIT license.
Acknowledgements
This work was supported by MEXT as “Program for Promoting Researches on the Supercomputer Fugaku” (Toward a unified view of the universe: from large scale structures to planets). This work uses HPCI shared computational resources hp190060 and hp180183. The simulations in this paper were carried out on a Cray XC50 system at the Centre for Computational Astrophysics (CfCA) of the National Astronomical Observatory of Japan (NAOJ) and a Cray XC40 system at the Academic Center for Computing and Media Studies (ACCMS) of Kyoto University. Test simulations were also carried out on Shoubu ZettaScaler-1.6 at the Institute of Physical and Chemical Research (RIKEN). We acknowledge the contribution of Akihisa Yamakawa, who developed an early version of the parallel |$\rm P^3T$| code.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}