





Abstract
The dynamical systems approach to numerical integration is reviewed and extended. The new method is compared to some alternative methods based on the Lie series approach. The test problem is the motion of the outer planets. The algorithms developed using the dynamical systems approach perform well.
1 INTRODUCTION
The integration method introduced by Wisdom & Holman (1991) and variations developed from it are used in most long-term studies of the evolution of planetary systems. The method is based on results from the theory of Hamiltonian dynamical systems (Chirikov 1979). The essential innovation of the method was to approximate the evolution of the n-body problem by interleaving the evolution of the Kepler problem with the evolution governed by the interactions. Wisdom & Holman (1991) used the Jacobi coordinates to effect the elimination of the centre of mass and split the Hamiltonian into Kepler and interaction terms. Subsequent variations have made use of different coordinate systems, or slightly different splittings of the n-body Hamiltonian, but the basic idea is the same.
The Wisdom & Holman (1991) method was used in the 100 Myr integration of Sussman & Wisdom (1992) of the full Solar system that demonstrated that the evolution of the Solar system is chaotic. This result confirmed the earlier result of Laskar (1989) that the evolution of the Solar system is chaotic. Note that the result of Laskar (1989) was uncertain because Laskar used an averaged and truncated model of the motion of the planets. It is well known that truncating an integrable problem can lead to chaotic behaviour. For instance, the integrable Toda problem, when truncated to degree three in the rectangular coordinates, can be transformed into the classic Hénon–Heiles problem (Contopoulos & Polymilis 1987). So a full integration was required to settle the issue of the chaotic character of the motion of the planets.
Wisdom, Holman & Touma (1996) introduced several extensions of the original method of Wisdom & Holman (1991). First, the idea of the ‘symplectic corrector’ was introduced. In the dynamical systems approach, the integration algorithm is described by a Hamiltonian that differs from the actual Hamiltonian by high-frequency terms. The two are related by an averaging step, and the integration variables can be related to the actual variables by a canonical transformation. This canonical transformation can sometimes be represented exactly (Tittemore & Wisdom 1988), but more generally it is approximated through composition methods. The use of the symplectic corrector allowed the demonstration that to a large extent the apparent error in the 100 Myr integration of Sussman & Wisdom (1992) was actually an error in mistaking the integration variables for the actual variables. Several years after the original integration, the apparent errors were reduced by approximately three orders of magnitude, using the original data. But Wisdom et al. (1996) made other advances. Taking the dynamical systems approach seriously, it was demonstrated that the original method of Wisdom & Holman (1991) could be extended to higher order in perturbation theory. The higher order ‘kernel’ method is here implemented for the n-body problem.
Laskar & Robutel (2001) presented a family of extensions of the method of Wisdom & Holman (1991). In particular, the method they label |${\cal SABA}_4$| is used in a number of their subsequent works (for example, Laskar et al. 2004, 2011). They suggest that their method ‘improves the precision by several orders of magnitude’ relative to the method of Wisdom & Holman (1991), ‘at the same cost’. They also introduce a ‘corrector’ step, but their corrector has no relation to the original symplectic correctors of Wisdom et al. (1996). If used in conjunction with their corrector, the method |${\cal SABA}_4$| is labelled |${\cal SABAC}_4$|. Here, I compare the accuracy and efficiency of these methods to those of Wisdom & Holman (1991) and Wisdom et al. (1996). The kernel is here explicitly implemented for the n-body problem. As a test problem, I chose to integrate the motion of the outer planets (Sun, Jupiter, Saturn, Uranus, and Neptune). It is found that the original method of Wisdom & Holman (1991) in conjunction with the symplectic corrector of Wisdom et al. (1996) outperforms the |${\cal SABA}_4$| method of Laskar & Robutel (2001). Furthermore, the higher order method of Wisdom et al. (1996), as implemented here, outperforms the |${\cal SABAC}_4$| method.
Indeed, the kernel method of Wisdom et al. (1996) performs as well as the high-order method IAS15 recently proposed by Rein & Spiegel (2014). One of their test problems is also the motion of the outer planets. Rein & Spiegel (2014) compare their method to various implementations of the method of Wisdom & Holman (1991), which they call ‘MVS’ and ‘WH’, and conclude ‘because IAS15 is always more accurate than either MVS or WH, it is hard to compare their speed directly’ (i.e. MVS and WH can never get as accurate as IAS15, no matter how long we wait). What we can compare IAS15 to is the most accurate simulation of MVS and WH. Even in that case, IAS15 is always faster than either MVS or WH’. Actually, for the motion of the outer planets, the method of Wisdom & Holman (1991), augmented with the methods of Wisdom et al. (1996) as implemented here, is as accurate and as fast as IAS15.
2 SOME BACKGROUND
The method of Wisdom & Holman (1991) is a direct descendent of the method of Wisdom (1982). Having studied Chirikov (1979), I realized that if one could study the evolution of a system using equations of motion averaged over the fast orbit periods, then one could equally well introduce high-frequency terms to make the system locally solvable. Thus, the evolution was approximated by a sequence of evolutions governed by different pieces of the Hamiltonian.
It was not long before I realized that there were two distinct steps in the derivation of the method. There was the averaging step in which high-frequency terms (orbital period terms) were removed from the Hamiltonian, and then there was the step in which new high-frequency terms were introduced to make the system locally solvable. Thus, one could study the evolution of systems that had not previously been averaged by the same process of introducing terms to make the system locally solvable.
In 1987, I developed an integrator for the Hénon–Heiles problem to illustrate the idea. I used two different splittings. The first was based on the splitting of the Hamiltonian into kinetic and potential energy, and the second was based on the splitting into a pair of harmonic oscillators and cubic interaction terms. The first might be described as a ‘T+V’ integrator; the second as an ‘A+B’ integrator. I did not publish these results, but presented them in some of my public lectures.
The ‘symplectic corrector’ was born during the same time frame. In our studies of the tidal evolution of the Uranian satellites (Tittemore & Wisdom 1988), we wanted to study surfaces of section, but the presence of the high-frequency terms introduced to develop the integrator inhibited a direct application. We realized that the variables used to make the integrator were different from the original variables. We developed a canonical transformation to relate the different variables. These works used the ‘F’ and ‘G’ functions used later, as in Wisdom et al. (1996).
Thus, the Wisdom & Holman (1991) method was an application of ideas I had previously understood. The innovation was to apply the methods of Wisdom (1982) and later works to the n-body problem. It is common to report that the method of Wisdom & Holman (1991) was an application of the Lie series approach to integration methods based on ‘mixed variables’ (Saha & Tremaine 1992; Laskar & Robutel 2001). This is just not the case. It had a different origin. The method of Wisdom & Holman (1991) is a Hamiltonian method that does not and has never depended on the choice of variables used to solve the pieces. And, furthermore, in the method of Wisdom & Holman (1991), the Kepler problem was advanced in rectangular coordinates using the Gauss f and g functions; no transformation of coordinates (‘mixed variables’) was involved.
Wisdom et al. (1996) extended the methods developed by Tittemore & Wisdom (1988) to develop a general formulation of ‘symplectic correctors’. The method is entirely based on the dynamical systems approach to numerical integration algorithms. It applies to any Hamiltonian that can be split into two pieces that are individually efficiently solvable and for which one piece is smaller than the other, as for the n-body problem. In the n-body problem, the Hamiltonian is split into the Kepler Hamiltonians that govern the interactions between the Sun and the planets, and the smaller interaction Hamiltonian that governs the mutual interactions of the planets.
3 HIGHER ORDER INTEGRATORS
In addition to introducing the symplectic correctors, Wisdom et al. (1996) also extended the dynamical systems approach to numerical integration to higher order in perturbation theory. Frankly, the presentation in Wisdom et al. (1996) can be improved. So the highlights are reviewed and corrected here.
The kernel Hamiltonian, equation (15), can be solved exactly and efficiently for the n-body problem. That is the method used here. If the second of the ε2 terms in LWHB could be solved efficiently, an even more accurate integrator could be formed. As it is, this unsolved term is the leading term in the error of the method. In the Hamiltonian, it is fourth order in h and second order in ε.
4 CONTRASTING THE DYNAMICAL SYSTEMS APPROACH TO THE LIE SERIES APPROACH
The Lie series approach (Yoshida 1993) is motivated by the usual matching of successive terms in the Taylor series of the solution. If this is done with Lie series then the algorithm is symplectic.
It has been claimed (Yoshida 1993) that |$\widetilde{H}$| is exactly conserved by algorithms defined as compositions of Lie series, and that this is why symplectic integration ‘works’. But the claim is evidently false. Yoshida (1993) illustrated the use of |$\widetilde{H}$| with the simple pendulum. The first-order composition method is the same as the standard map, up to scaling of the variables. The standard map exhibits the full range of behaviours now expected of Hamiltonian systems, including resonances and chaotic behaviour (Chirikov 1979). If |$\widetilde{H}$| were exactly conserved, as claimed, then all the trajectories of the standard map would fall on contours on |$\tilde{H}$|, and there would be no chaotic behaviour. So, evidently, the series defining |$\tilde{H}$| does not converge. In any case, being an autonomous one degree-of-freedom Hamiltonian |$\widetilde{H}$| cannot be the Hamiltonian governing the evolution of the algorithm since the algorithm exhibits chaotic behaviour. At most, |$\widetilde{H}$| sometimes provides an approximate conserved quantity. Since the integrator evolution, described by equation (24), involves a discontinuous switch between an evolution governed by HA to one governed by HB, it should not be surprising that the combined evolution is actually described by a non-autonomous Hamiltonian involving delta functions.
An advantage of the dynamical systems approach is that the numerical algorithm is exactly described by a Hamiltonian. The stability of the algorithm can be analysed and understood using the resonance overlap criterion (Wisdom & Holman 1992). And ordinary Hamiltonian perturbation theory can be used to understand and extend the method (Wisdom et al. 1996). The algorithms of Wisdom & Holman (1991) and Wisdom et al. (1996) are symplectic, because they are derived from a Hamiltonian. But being symplectic was never the motivating property. Indeed, the method of Wisdom (1982) is symplectic, but this was not realized until after the method was published. Many of the results of the dynamical systems approach can be given a Lie series correspondence (Wisdom et al. 1996), but the dynamical systems approach provides more intuition about why it works and how to extend it.
5 COMPARISONS
The problem I use to compare the methods is the motion of the outer planets. I use each method to integrate the motion of the outer planets for 2 billion days, or approximately 5.5 million years. I sampled the energy error every 20 000 steps, and report the maximum relative energy error for the integration as a function of stepsize. Since the different methods require a different amount of computer time to accomplish a step, I introduce the effective stepsize heff. I record the computer time required for each method to accomplish the 2 billion day integration and compare this to the computer time required for the method of Wisdom & Holman (1991) to accomplish the same integration. Let h be the stepsize of the method, and α be the ratio of the computer time used by the method to that of the Wisdom–Holman method with the same stepsize. The effective stepsize is heff = h/α. With this definition, two different methods take the same amount of computer time to accomplish the integration if they use the same heff.
Any such comparison is, of course, somewhat dependent on the skill of the programmer to write efficient code. For the Kepler stepper, I use the method of Wisdom & Hernandez (2015). The Kepler stepper uses the Gauss f and g functions to advance the orbit directly in rectangular coordinates. It uses universal variables, and the computations are carried out without the use of the Stumpff series. I find that my code is comparable in speed and accuracy to WHFast (Rein & Tamayo 2015). I have used the same components in all comparisons.
The first comparison is to the method |${\cal SABA}_4$| of Laskar & Robutel (2001). Fig. 1 shows the common logarithm of the relative energy error, ΔE/E, versus the common logarithm of the effective stepsize heff. The figure reports the results of several thousand integrations each spanning 2 billion days (about 5.5 million years). The top black curve reports the results for the method of Wisdom & Holman (1991). This is the standard to which all other methods are compared. For this method, the stepsize h is the same as the effective stepsize heff. The lower black curve reports the results of the method of Wisdom & Holman (1991) with the symplectic corrector of Wisdom et al. (1996) applied. The corrector is applied only at the output points and does not contribute significantly to the computer time. The blue curve reports the results for the |${\cal SABA}_4$| method. I find that this method is approximately 4.296 times more expensive (in computer time) than the method of Wisdom & Holman (1991) with the corrector (WHC). The corrector method is uniformly more accurate at comparable work (the same heff). Further, the initial transient at large stepsize occurs at smaller heff for the |${\cal SABA}_4$| than for WHC. In other words, with |${\cal SABA}_4$| one must do much more work to even begin to get an accurate integration than with WHC.
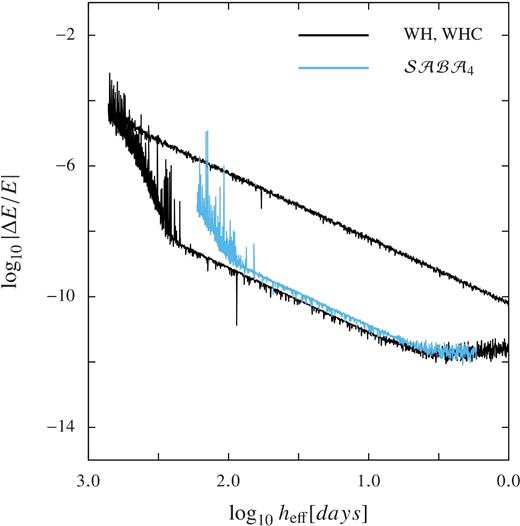
The common logarithm of the absolute value of the relative energy error ΔE/E is plotted versus the common logarithm of the effective stepsize heff. The upper black curve is for the Wisdom–Holman method; the lower black curve is for the Wisdom–Holman method with the corrector. The blue curve is for the |${\cal SABA}_4$| method.
It is ironic that Laskar & Robutel (2001) dismiss the use of the corrector of Wisdom et al. (1996). They state ‘The use of such a procedure, especially when the solution is chaotic, is not clear’. The corrector was motivated by the averaging relationship between the integration variables and the actual variables. Yet, Laskar (1989) relied on averaging in his initial demonstration of the chaotic character of the motion of the Solar system!
Laskar & Robutel (2001) introduce a ‘corrector’ method to reduce the errors of their method. As mentioned, this corrector is not the same as the corrector introduced by Wisdom et al. (1996). The corrector of Laskar & Robutel (2001) is applied at every integration step. Taken literally, it is applied twice per integration step, but I have taken the liberty of optimizing the method by combining the two adjacent corrector steps. I find that the |${\cal SABAC}_4$| method is about a factor of 5.180 times slower than the Wisdom–Holman method. By contrast, the kernel method of Wisdom et al. (1996) is about a factor of 1.615 times slower than the Wisdom–Holman method. The results are reported in Fig. 2. One can see that the dynamical systems kernel method outperforms the method of Laskar & Robutel (2001). One can also see that the methods are reaching the limit of the numerical precision on the lower right side of the figure. I will address this issue in the next comparison.
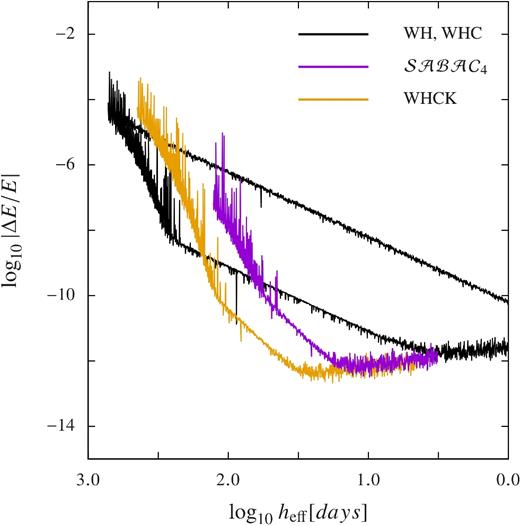
The common logarithm of the absolute value of the relative energy error ΔE/E is plotted versus the common logarithm of the effective stepsize heff. The two black curves are again the Wisdom–Holman method and the Wisdom–Holman method with corrector. The purple curve is for the |${\cal SABAC}_4$| method. Considerable computer time must be expended before the large stepsize transient is passed. The orange curve is for the Wisdom–Holman method with the kernel and corrector. The kernel method is useable at a larger effective stepsize.
Laskar & Robutel (2001) did not use this trick. Instead, they reported some results with complete quadruple precision calculations. I have taken the liberty of modifying the |${\cal SABAC}_4$| method to use compensated summation. I have also modified the kernel method. For the latter, I have applied both correctors. The results are shown in Fig. 3. One can see that both methods reach a relative error of order 10−14 in these 5.5 million year integrations. But the kernel method of Wisdom et al. (1996) reaches this level of error with less work.
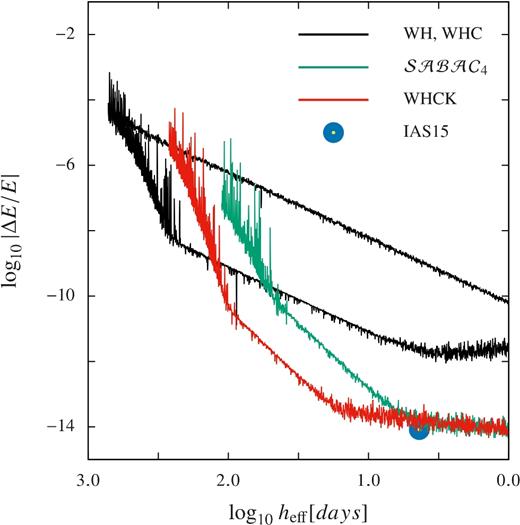
The common logarithm of the absolute value of the relative energy error ΔE/E is plotted versus the common logarithm of the effective stepsize heff. The two black curves are again the Wisdom–Holman method and the Wisdom–Holman method with corrector. They are there for reference; I have not use compensated summation in either. The green curve is for the |${\cal SABAC}_4$| method extended here to use compensated summation. The red curve is for the kernel method (Wisdom et al. 1996). The kernel method is useable at a larger effective stepsize. The centre of the blue dot exhibits the results for the IAS15 variable stepsize integrator.
The centre of the large blue dot in Fig. 3 is the error of IAS15 for the same problem. The integrator IAS15 is a high-order variable stepsize integrator that selects its own stepsize (Rein & Spiegel 2014). In this case, the stepsize oscillates around 70–80 d. It also uses compensated summation to reduce error. To compute heff, I averaged the stepsize used (to find 75.17 d) and then divided by the ratio of the computing time to that of the Wisdom–Holman method. The kernel method, augmented with compensated summation, reaches a comparable error for the same heff.
It is interesting to note that the error continues to decline as the stepsize decreases even after the numerical floor is reached. This contrasts with the behaviour found in Fig. 2, where the error grows as the stepsize is decreased once the numerical floor is reached. Evidently, numerical error is a complicated process!
In billion year integrations of the outer planets, I find that when using WHC the energy error at large stepsizes does not appear to grow. Any growth of error is masked by oscillatory terms. At small stepsizes, the energy error grows irregularly, approximately as the square root of time. This is also true of the kernel method, whether or not compensated summation is used. Thus, these methods, which use the unbiased Kepler solver of Wisdom & Hernandez (2015), obey ‘Brouwer's law’ (Rein & Spiegel 2014).
6 CONCLUSIONS
The original method of Wisdom & Holman (1991), with the improvements of Wisdom et al. (1996) and the explicit implementation of the kernel method reported here, appears to be pretty much optimal for studying the evolution of regular planetary systems such as the motion of the outer planets. These methods can be used in either a ‘qualitative mode’ at large stepsizes with just the corrector, or in a high-accuracy mode with the kernel and associated correctors.
Acknowledgements
I thank Scott Tremaine, Hanno Rein, and Dan Tamayo for helpful remarks.
REFERENCES
APPENDIX
The strategy of Wisdom et al. (1996) was to start with the Hamiltonian governing the evolution of the system under study and transform this into the integrator Hamiltonian plus error terms through a series of canonical transformations. In this appendix, the strategy is reversed. I start with the Hamiltonian for the integrator and show that through canonical transformations this can be transformed into the Hamiltonian under study, plus some error terms. The two approaches are equivalent.
Notice that the momentum conjugate to time, T, appeared in only one place; it was added to the Hamiltonian to make the transition to the extended phase space. So if we perform the Lie transform with respect to W of any function of the original phase space coordinates, then there are no derivatives with respect to t (because T does not appear). In these cases, we may treat t as a parameter of the transformation. That is, it does not matter whether we assign t a value before or after the transformation. So having gone to the extended phase to determine W, we can return to the original phase space with t being a parameter. A convenient choice is t = h/2, and we obtain the corrector for the leap frog. It no longer depends on t and is only useful for transforming functions of the phase space coordinates midway between the delta functions.

{kind=link}
{kind=link}
{kind=link}