





Abstract
If sufficiently irradiated by its central star, a protoplanetary disc falls into an equilibrium state exhibiting vertical shear. This state may be subject to a hydrodynamical instability, the ‘vertical shear instability’ (VSI), whose breakdown into turbulence transports a moderate amount of angular momentum while also facilitating planet formation, possibly via the production of small-scale vortices. In this paper, we show that VSI modes (a) exhibit arbitrary spatial profiles and (b) remain non-linear solutions to the incompressible local equations, no matter their amplitude. The modes are themselves subject to parasitic Kelvin–Helmholtz instability, though the disc rotation significantly impedes the parasites and permits the VSI to attain large amplitudes (fluid velocities ≲ 10 per cent the sound speed). This ‘delay’ in saturation probably explains the prominence of the VSI linear modes in global simulations. More generally, the parasites may set the amplitude of VSI turbulence in strongly irradiated discs. They are also important in breaking the axisymmetry of the flow, via the unavoidable formation of vortices. The vortices, however, are not aligned with the orbital plane and thus express a pronounced z-dependence. We also briefly demonstrate that the vertical shear has little effect on the magnetorotational instability, whereas magnetic fields easily quench the VSI, a potential issue in the ionized surface regions of the disc and also at larger radii.
1 INTRODUCTION
Large swathes of protoplanetary (PP) discs are too poorly ionized for the magnetorotational instability (MRI) to be active, at least as classically understood (Turner et al. 2014). In particular, their cold dense interior regions (between roughly 1 and 10 au) could be entirely laminar, though non-ideal MHD may produce large-scale fields and winds (Bai 2014; Lesur, Kunz & Fromang 2014; Simon et al. 2015). In the last 10–15 years this state of affairs has renewed interest in hydrodynamical routes to turbulence in these ‘dead zones’, and various weak instabilities have been uncovered (or rediscovered) that might operate there (Fromang and Lesur 2017). It is unlikely that any of these instabilities is particular widespread, nor the solution to the question of angular momentum transport, but under certain circumstances they could be important, especially for solid dynamics and planet formation.
We focus on the vertical shear instability (VSI), a process that, as it names suggests, exploits any vertical shear supported by the disc. Indeed, irradiated PP discs generally manifest baroclinic equilibria that exhibit gentle vertical variation in the rotation rate (Nelson, Gressel & Umurhan 2013; Barker and Latter 2015). The VSI is a close cousin of the Goldreich–Schubert–Fricke instability (GSFI; Goldreich and Schubert 1967; Fricke 1968), and is similarly centrifugal in nature. When stable stratification is included it is also double-diffusive, with instability restricted to lengthscales upon which thermal diffusion is strong (negating the stable entropy gradient) but viscosity is weak (thus unable to obstruct the unstable angular momentum gradient).
While the GSFI probably saturates at too low a level to be important in stars (James and Kahn 1970, 1971; see also Caleo, Balbus & Tognelli 2016), the VSI may have greater traction in astrophysical discs, even if the intensity of its saturated state remains uncertain, and no doubt depends on how forcibly the vertical shear is maintained. Unlike the GSFI, the VSI's non-linear evolution has been pursued almost solely in global simulations (Nelson, Gressel & Umurhan 2013; Stoll and Kley 2014; Richard, Nelson & Umurhan 2016; Stoll, Kley & Picogna 2017). These show the flow degenerating into small-scale turbulence near or upon the disc's surfaces, followed by the emergence of large-scale inertial waves with little vertical structure. While the former activity is probably the work of the local modes described by Boussinesq analyses (Urpin and Brandenburg 1998; Urpin 2003), the latter waves are global modes that are best captured in vertically stratified models (Nelson, Gressel & Umurhan 2013; Barker and Latter 2015; Lin and Youdin 2015; McNally and Pessah 2015). Interesting features that arise in some simulations are vortices, whose aspect ratios and lifetimes depend on the background gradients (Richard, Nelson & Umurhan 2016). Because of their potential impact on solid dynamics, it is important to understand the nature of vortex formation and its connection to general VSI saturation. This is the main topic of this paper.
We work within the convenient framework of Boussinesq hydrodynamics because it is especially responsive to analytical techniques. We first reveal important properties of the small-scale VSI modes, such as (a) they are non-linear solutions to the governing equations (and hence can achieve large amplitudes naturally), and (b) they can manifest arbitrary spatial profiles. This gives us confidence that our Boussinesq analysis adequately approximates some of the non-linear waves and other features appearing in global simulations. We also apply the linear theory to simple low-mass PP disc models, finding in particular that the VSI grows at near its maximum rate even at 1 au on scales of order 10−2H or less (where H is the disc scale height). Larger scale body modes may be subdominant here, but small-scale VSI turbulence is still viable.
Because the non-linear VSI modes exhibit significant shear and vorticity extrema, they are subject to Kelvin–Helmholtz parasitic instability. As a consequence, small-scale vortices are a robust and unavoidable outcome of the VSI's evolution. The advent of both axisymmetric and non-axisymmetric parasites is delayed until the VSI achieves a relatively large amplitude, characterized by a Rossby number greater than 1 (velocities between 1 and 10 per cent the sound speed). Up to that point the axisymmetric parasites are stabilized by the disc's radial angular momentum gradient, while the non-axisymmetric parasites are sheared out before they get large. These two effects explain why the linear VSI modes feature so prominently in global simulations, at least initially.
More generally, the parasites may set the level of VSI turbulence, but only if the vertical shear is vigorously enforced by the stellar radiation field. If the VSI is especially efficient vis-a-vis the stellar driving, the saturated state will be low amplitude and controlled by the competition between the VSI and the driving, not the parasites. One could also imagine intermediate scenarios when all the physical processes are important.
We finally include a short section exploring the influence of MHD. Because of the vertical shear, magnetic equilibria have to be constructed carefully in order to satisfy Ferraro's law. We find that sufficiently strong magnetic fields stabilize the VSI: when ideal MHD holds and the average vertical plasma beta (β) is less than roughly (R/H)2 ∼ 400 then no VSI modes of any length can grow. But the critical β is far higher for short-scale modes, and this poses a problem for the VSI in the relatively well ionized upper layers of PP discs – locations in which it is thought to be most prevalent. It may also be an issue at larger radii throughout the vertical column. In contrast, vertical shear has no impact on the fastest growing magnetorotational modes.
The paper plan is as follows. In Section 2 we revisit the VSI analysis in a Boussinesq local model, showing that the linear modes are also non-linear solutions and calculating both axisymmetric and non-axisymmetric examples, growth rates, and stability criteria. A short subsection applies these results to simple low-mass disc models and makes some comparison with previous work. Section 3 analyses the parasitic instabilities that may attack the non-linear VSI modes, examining axisymmetric and non-axisymmetric parasites separately and for different limiting amplitudes of the underlying VSI. Section 4 presents a relatively brief generalization to MHD, in which the MRI makes an appearance. We draw our conclusions in Section 5.
2 THE VERTICAL SHEAR INSTABILITY
2.1 Equations of incompressible hydrodynamics
In this section we describe the VSI in the framework of incompressible hydrodynamics, a model that successfully represents flows that are subsonic and which support only small thermodynamic variations (as is the case for shear/centrifugal instabilities like the VSI). Consequently, lengthscales are assumed to be much less than the disc scale height, and global disc features are not described properly. However, the disc's large-scale vertical shear can be incorporated into this model in a straightforward and consistent way as shown by Latter and Papaloizou (2017). At this stage vertical stratification (i.e. buoyancy), radiative cooling, and viscous diffusion are neglected. This need not be a problem for the VSI, however, as there is often a range of lengthscales between the vast gulf separating the viscous scales (∼10 km) and the stratification scale (∼H), within which thermal diffusion (or cooling) dominates and ‘cancels out’ the latter stabilizing effect. The system on these scales neither feels viscosity, stratification, nor thermal diffusion itself. In Appendix A we reproduce an analysis with the omitted physics to show that our main results are unaltered.
In addition, we adopt the shearing sheet formalism, whereupon a small patch of the PP disc centred at R = R0 and Z = Z0 ≠ 0, and orbiting with frequency Ω0 = Ω(R0, Z0) is described using a corotating Cartesian reference frame. In it x, y, and z represent the local radial, azimuthal, and vertical directions, with their origin the centre of the box.
One of the attractions of these equations is that they are controlled by a single parameter q, and have no natural lengthscale: the outer scale is taken to infinity, while the viscous scale is taken to zero. This, of course, makes them difficult to directly apply to real systems – but makes analytical progress much easier.
2.2 General non-linear perturbations
2.3 The axisymmetric VSI
There is no characteristic lengthscale in the governing equations, and so the growth rate can only depend on wavevector orientation. Viscosity or vertical structure will introduce a lengthscale dependence. See Appendix A and Section 2.4 for more details. Because non-axisymmetric disturbances always tend to orient themselves along the gradient of Ω, i.e. kx/kz = 2/(3q), they becomes stable after some point in their evolution, and hence ultimately decay, as shown explicitly at the end of the last subsection.
2.4 Stratification, cooling, and viscosity
We now briefly summarize the full problem in which buoyancy, viscous diffusion, and cooling is included. In PP discs, the photon mean free path varies substantially: from a tiny fraction of H at 1 au, to greater than H at 100 au (e.g. Lin and Youdin 2015; Lesur and Latter 2016). As a consequence, radiative cooling takes different forms, depending on the age/mass of the disc, radial, and vertical location, and on the lengthscale of the perturbations. We mainly adopt the diffusion approximation, but are aware this is invalid for sufficiently short-scale perturbations at radii less than about 10 au, and for almost all perturbations at larger radii. The viscosity we employ is treated as molecular, though might also represent diffusion by weak pre-existing small-scale turbulence. It could also be a model for unavoidable grid diffusion in numerical simulations.
Two new parameters now appear, (a) the Richardson number n2 = N2/Ω2, where N is the vertical buoyancy frequency, and (b) the Prandtl number Pr = κ/ν where κ is thermal diffusivity and ν viscosity.
2.4.1 Main results
On shorter scales the diffusion approximation breaks down and we may replace it with Newtonian cooling. Typically, the transition between these two cooling regimes occurs within the plateau of maximum growth, described above. The wavenumber of the transition can be estimated from either k ∼ 1/lph, where lph denotes the photon mean fee path, or simply |$k \sim 1/\sqrt{\tau \kappa }$|, where τ is the Newtonian cooling time-scale. At the transition point the cooling rate, which had been increasing with k2, hits the constant Newtonian ceiling. See Lin and Youdin (2015) for a detailed treatment of this transition.
2.4.2 Application to a low-mass disc
We now see how these estimates fare when applied to models of PP disc structure. Consider the less massive nebula used in Lesur and Latter (2016), in which the disc's surface density is |$\propto 140 R_{\rm {au}}^{-1}$| g cm−2 and the temperature is equal to 280|$R_{\rm {au}}^{-1/2}$| K. Here Rau is disc radius in au. PP discs are moderately stratified, with n ≲ 1, and we set q ∼ H/R ∼ 0.05. Lesur and Latter (2016) also estimate the photon mean free path, which rises from a little over 10−4H at 1 au, to ∼10−2H at 10 au, before exceeding H at 100 au. Fluctuations with lengthscales below this cool at the Newtonian rate: less than 10−3 Ω−1 for radii between 1 and 10 au, but rising to 5 × 10−2 Ω−1 at 100 au. Table 1 summarizes some of this information.
Properties of a low-mass PP disc at three different radii. Here Σ is surface density, lph is photon mean path, and τ is the cooling rate for lengthscales less than lph. Here |$\lambda ^{\rm plat}_{\rm VSI}$| denotes the lengthscale below which the VSI achieves its maximum value (in the diffusion approximation). On lengthscales less than lph, however, the VSI can grow at its maximum level if τΩ ≪ 5 × 10−2.
| Radius | 1 au | 10 au | 100 au |
|---|---|---|---|
| Σ/(gcm−2) | 140 | 14 | 1.4 |
| lph/H | 10−4 | 10−2 | >1 |
| τΩ | 10−4 | ≲ 10−3 | 10−2 |
| |$\lambda ^{\rm plat}_{\rm VSI} / H$| | 3 × 10−2 | ≲ 1 | ∼1 |
| Radius | 1 au | 10 au | 100 au |
|---|---|---|---|
| Σ/(gcm−2) | 140 | 14 | 1.4 |
| lph/H | 10−4 | 10−2 | >1 |
| τΩ | 10−4 | ≲ 10−3 | 10−2 |
| |$\lambda ^{\rm plat}_{\rm VSI} / H$| | 3 × 10−2 | ≲ 1 | ∼1 |
Properties of a low-mass PP disc at three different radii. Here Σ is surface density, lph is photon mean path, and τ is the cooling rate for lengthscales less than lph. Here |$\lambda ^{\rm plat}_{\rm VSI}$| denotes the lengthscale below which the VSI achieves its maximum value (in the diffusion approximation). On lengthscales less than lph, however, the VSI can grow at its maximum level if τΩ ≪ 5 × 10−2.
| Radius | 1 au | 10 au | 100 au |
|---|---|---|---|
| Σ/(gcm−2) | 140 | 14 | 1.4 |
| lph/H | 10−4 | 10−2 | >1 |
| τΩ | 10−4 | ≲ 10−3 | 10−2 |
| |$\lambda ^{\rm plat}_{\rm VSI} / H$| | 3 × 10−2 | ≲ 1 | ∼1 |
| Radius | 1 au | 10 au | 100 au |
|---|---|---|---|
| Σ/(gcm−2) | 140 | 14 | 1.4 |
| lph/H | 10−4 | 10−2 | >1 |
| τΩ | 10−4 | ≲ 10−3 | 10−2 |
| |$\lambda ^{\rm plat}_{\rm VSI} / H$| | 3 × 10−2 | ≲ 1 | ∼1 |
The plateau of maximum growth occurs for wavelengths roughly less than q1/2n−1Pe−1/2H, where Pe = H2Ω/κ is the Peclet number. At 1 au we find that the plateau begins at a wavelength less than 3 × 10−2H, and thus the fastest growing modes are shortscale and well described by our Boussinesq model. The photon mean free path, on the other hand, is lph ∼ 10−4H and so the diffusion approximation holds for at least two decades in wavenumber upon which maximum growth is achieved. Below lph, however, the VSI will remain growing at the same maximum value until the viscous cut-off, this is because the Newtonian cooling rate τ easily satisfies (18).
At 10 au, we find that the plateau begins at a longer lengthscale ≲H, and thus the local model is a poor approximation on the long end of the range of maximum growth. At this location lph ∼ 10−2 and the diffusion approximation still holds on this upper range, while the Newtonian cooling rate still satisfies (18).
At 100 au, lph > H and the diffusion approximation must be discarded entirely in favour of a Newtonian cooling prescription (Lin and Youdin 2015). Moreover, maximum growth is no longer possible because Ωτ ∼ 10−2 ∼ q(Ω2/N2), and (18) no longer satisfied. At these radii the VSI begins to suffer, growing at a lower rate, in rough agreement with analogous calculations (Lin and Youdin 2015; Malygin et al. 2017).
To inspect how the VSI fares in more massive disc models the reader is directed to Lin and Youdin (2015) and Malygin et al. (2017). Due to the longer cooling times of these objects, the VSI is less prevalent. However, we do point out that short-scale VSI modes should not be neglected in these analyses. Though they may be inefficient at transporting angular momentum, or erasing the vertical shear, they are still perfectly good at generating vortices. And vortices need not be large-scale to do interesting things with solid particles.
2.5 Example solutions
In this subsection we present some numerical solutions describing the VSI's evolution. To get a better idea of how the unstratified axisymmetric mode depends on the orientation of its wavevector, we plot in Fig. 1 the growth rate s versus tan−1(kz/kx), the angle the wavevector makes with respect to the x-axis. Quite clear is the extremely narrow range of angles available to the VSI, some 6° above the disc plane. Maximum growth, as shown earlier, occurs when kx/kz ≈ −1/q.
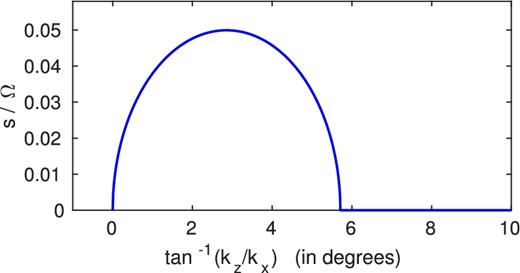
Growth rate of the axisymmetric VSI, as determined by equation (13) as a function of wavenumber orientation angle tan −1(kz/kx) as measured from the x-axis. The angle is given in degrees. Here q = −0.05 and we see that instability takes its maximum value ∼|q|Ω, while being restricted to a narrow arc of wavevector angles spanning only some 6°.
In Fig. 2 we plot the evolution of |$\bar{u}_x(t)$| for a non-axisymmetric VSI disturbance in time. The system of equations (10) was solved with a Runge–Kutta algorithm, for fiducial initial conditions corresponding to a leading wave at t = 0. Substantial growth occurs near Ωt ≈ 42.5, as the wave vector passes through the arc of axisymmetric growth (around kx/kz ≈ −1/q). Once the wavevector enters stable orientations, at later times, the disturbance decays as predicted, oscillating with a frequency ∼qΩ with an envelope going as t−1/2.
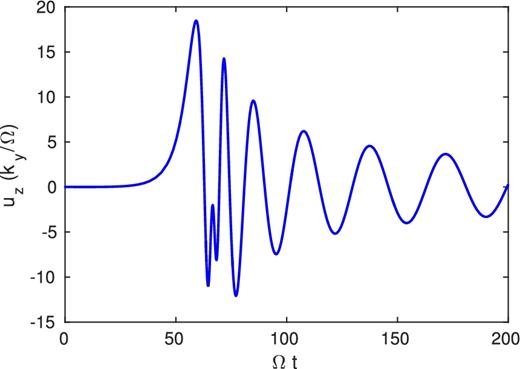
Numerical solution to equation (10) for a non-axisymmetric disturbance with kx0/ky = −100, kz0/ky = 1, and initial condition |$\bar{u}=(0.01,{\, }-0.01,{\, }0.01)$|. Finally, q = −0.1.
Finally, in Fig. 3 we plot a representative dispersion relation for the axisymmetric VSI with stratification, viscosity, and thermal diffusion. Note the conspicuous plateau extending from roughly the thermal diffusion scale |$\sqrt{\kappa /\Omega }$| to the viscous cut-off some two orders of magnitude smaller. Upon the plateau, s takes almost the same value as in the inviscid unstratified situation, equation (13).
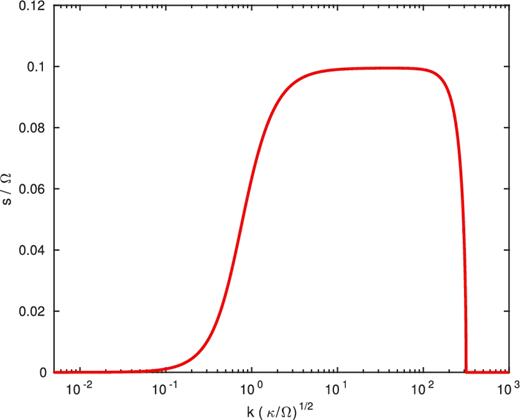
Growth rate of the axisymmetric VSI when stratification, viscosity, and thermal diffusion are included. Parameters are q = −0.1, Pr = 10−6, n2 = 0.1, and kx/kz = 10. Here the viscous scale corresponds to kν ∼ 103, in units of |$\sqrt{\Omega /\kappa }$|, while the thermal diffusion scale is ∼1. The fastest growth occurs on a range of lengths between these limits, and here s is approximately the same as if there were no stratification, nor viscous and thermal diffusion.
3 KELVIN–HELMHOLTZ PARASITES
Because the VSI modes are non-linear solutions they can grow to arbitrarily large amplitudes, at least in principle. Before they grow too large, however, they will be attacked by secondary parasitic instability, especially if the spatial profile of the modes f(ξ) exhibits sufficient shear. As in similar problems (e.g. the MRI), the primary parasitic instability will be of Kelvin–Helmholtz type (Goodman and Xu 1994; Latter, Lesaffre & Balbus 2009; Pessah and Goodman 2009), which in the hydrodynamic context may lead to vortex formation. (In MHD, magnetic tension prevents the rolling up of vortex sheets.) In this section of the paper we explore how effective parasitic modes are and how associated vortices may arise.
The key parameter in what follows is the amplitude of the VSI mode, V, which can only be expressed in terms of Ω/k. We regard the VSI mode to be of small amplitude if V ≪ Ω/k, of moderate amplitude if V ∼ Ω/k, and of large amplitude if V ≫ Ω/k. This motivates the introduction of the VSI's Rossby number Ro =kV/Ω, a proxy for the VSI amplitude.
3.1 Axisymmetric parasites
The first simplifying case we investigate assumes that the parasite is axisymmetric, so that |$\mathrm{\partial} _y\boldsymbol {u}_2=\mathrm{\partial} _yP_2=0$|. This is not especially restrictive: for modest amplitudes of the background VSI (and parasitic growth rates of order Ω or less), axisymmetric parasites should be the most effective in overcoming their hosts. This is because non-axisymmetric disturbances are sheared out on their instability time-scale and only grow transiently: in their short window of growth they may fail to achieve sufficient amplitudes (Appendix B of Latter et al. 2010, and also Rembiasz et al. 2016).
Strictly speaking, we are permitted to make the above assumptions and manipulations only when s = 0. But if q is assumed to be small, s ∼ |q|, and we are concerned with a time interval much less than the VSI's e-folding time, then we may neglect variations in the quantity exp (st), in exactly the same way as if the VSI was marginal. Then (28) and (29) hold more generally, and terms of order q and higher may then be neglected in (24)–(27).
Via these manipulations and approximations we finally obtain a second-order eigenvalue problem in a single variable, ζ, with eigenvalue σ. The input parameters are q (from which we obtain the ratio of the components of |$\boldsymbol {u}_1$|), V, and the wavenumber of the parasite Kη. In addition, the spatial structure of the host VSI mode, f(ξ), must also be supplied.
3.1.1 The small VSI-amplitude limit
3.1.2 Moderate VSI amplitudes
In summary, we expect the advent of parasitic instability to be delayed until the VSI amplitude (V) is rather large. In contrast to the MRI, in which parasites can always grow but not always sufficiently fast, the VSI parasites cannot grow at all until stabilizing rotation is overwhelmed. In the next subsection we investigate the case of large VSI amplitude, when this is assured.
3.1.3 The large VSI amplitude limit
3.1.4 Numerical calculations
To illustrate the behaviour of the axisymmetric parasites for different V, we numerically calculate the parasitic growth rates for a fiducial VSI mode: f(ξ) = sin ξ, q = −0.01, kx/kz = 1/q. Equations (24)–(27) are solved in the limit of small q, so that we may calculate explicit growth rates |σ|. The resulting Floquet eigenvalue problem is solved with a pseudo-spectral method (Boyd 2001).
We examine only modes with zero Floquet exponents, as they are the fastest growing. For each V we maximize the growth rate over the wavenumber Kη and plot our results in Fig. 4. For large Rossby numbers, kV/Ω, we see clearly that |σ| ∝ kV/Ω, as expected for a shear instability, and that the growth rate exceeds the rotation rate: the modes are very fast growing. The η-wavenumber of maximum growth is ≈0.6k generally. As the Rossby number approaches 1, the growth rate drops, and at the critical value kVcrit/Ω ≈ 1.38 the Kelvin–Helmholtz parasites die off, stabilized by rotation (consistent with equation (38)). At this point the algorithm picks up the growth of the VSI itself, with the low rate ∼|q|Ω. Of course, during the VSI evolution this procedure occurs in reverse: initially V is small and then slowly grows to moderate and then to large amplitude.
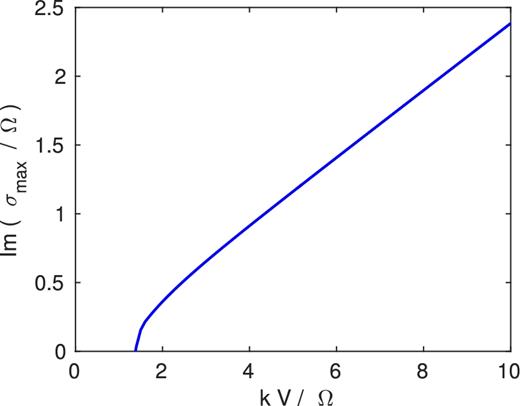
Parasitic growth rates maximized over Kη for different VSI amplitudes (i.e. Rossby numbers) kV/Ω. Here q = −0.01 and the underlying VSI mode possesses sinusoidal structure, f(ξ) = sin ξ. Because V increases with time (at the slow rate |q|Ω) the x-axis may be thought of as a proxy for time.
3.2 Non-axisymmetric instability
We next consider non-axisymmetric parasitic instabilities. Because of their transient growth, such parasites may only be important when the VSI achieves large amplitudes, but when in this regime they should dominate because they can more effectively extract shear energy than their axisymmetric counterparts. They are also of interest because they are clearly the means by which axisymmetry breaks down in the VSI dynamics. The vortices they produce will be better aligned with the disc plane, unlike those that originate from the axisymmetric parasites discussed in the previous subsection.
3.2.1 Tight-winding limit
The first limit we treat is the tight-winding approximation for which the Keplerian shear may be neglected. From (44) this requires |$K_y\Omega /k \ll |{\boldsymbol K} V|.$| Assuming, as above, that |$|{\boldsymbol K}|/k\sim 1,$| this corresponds to |$K_y/K_\eta \ll |{\boldsymbol K}V |/\Omega .$| Thus in the limit of sufficiently small Ky/Kη, the Keplerian shear may be neglected. In this limit the set of equations (40)–(43) becomes equivalent to the set (24)–(27) that governs the axisymmetric problem. Accordingly, equation (34) is recovered in the small q, small Ky/Kη limit.
3.2.2 The large VSI-amplitude limit
3.3 Discussion
Putting together these theoretical details, we can construct a relatively straightforward account of a VSI mode's growth and evolution.
First, the VSI will grow relatively unhindered up to ‘moderate’ amplitudes, 0 < V < Ω/k. It is a non-linear solution, so there are no non-linear effects to intervene. During this time, non-axisymmetric parasitic modes will fail to get any traction because they only grow transiently over a shear time 1/Ω: if their growth rates during this time are (at most) proportional to kV then they will only amplify by a factor exp[(Vk/Ω)(e − 1)] ≲ 5.575, most likely insufficient to overtake their host. Axisymmetric parasites are untroubled by the shear; however, they are strongly stabilized by the disc's rotation when at these low Rossby numbers (as explained in Section 3.1.2 and illustrated in Fig. 4). Only when the VSI amplitude is above a critical value V > Vcrit ≳ Ω/k will axisymmetric parasites grow exponentially and ultimately disturb the underlying mode. Near the same point non-axisymmetric parasites may also achieve greater amplitudes during their windows of growth. This will all occur at some second critical value V = Vmax. It is unclear whether the axisymmetric or non-axisymmetric parasites will launch the first successful attack. It is possible that they may emerge concurrently.
3.3.1 Maximum VSI amplitudes
The precise value of Vcrit is determined by the details of the flow, in particular by the form of f(ξ). The value of the maximum VSI amplitude Vmax is the amplitude at which the VSI mode is significantly disrupted. It is necessarily larger than Vcrit, and may be estimated using arguments presented in Latter (2016).
An alternative, and more general, upper limit on V can be obtained by noting that k ∼ kx ∼ |1/q|kz ≳ |1/qH|, where H is the disc scale height. VSI modes with kz ∼ 1/H might correspond to the ‘body modes’ witnessed in global simulations and vertically stratified boxes (Nelson, Gressel & Umurhan 2013; Barker and Latter 2015). This then implies that Vmax ≲ |q|cs ∼ (H/R)cs. Once again, we find that the maximum turbulent speeds should be a few per cent to 10 per cent the local sound speed.
3.3.2 Saturation and comparison with simulations
These maximum amplitudes we expect to be attained at the beginning of the VSI evolution. But what happens next, after the system breaks down into a turbulent state and saturates? What velocity amplitudes might we expect in this state? The answers to these questions lie in the radiative driving of the vertical shear and its relative strength in comparison with the VSI. One can envisage two limits.
First, suppose that the vertical shear is strictly enforced by the star's radiation field, and so the VSI is relatively ineffective in smoothing it out. This is certainly the scenario in our shearing box model, in which the vertical shear is ‘hard-wired’ into the box. It is also the case for isothermal global simulations or ideal gas simulations with short relaxation times (Nelson, Gressel & Umurhan 2013). The VSI will churn away upon the vertical shear, but be unable to erase it. One might then be tempted to ascribe the general VSI saturation to the parasitic modes, rather than a weakening of the underlying unstable state. The parasites limit VSI growth via a transfer of energy to smaller scales and ultimately the viscous length, and will set their characteristic amplitude. This turbulent amplitude would then be ≲ Vmax, a few per cent or more of the sound speed, and indeed this is in rough agreement with global simulations (Nelson, Gressel & Umurhan 2013; Stoll and Kley 2014). In fact, the relatively large amplitudes produced by these simulations, and the fact that the saturated state is characterized by non-linear structures similar in form to linear modes, provides strong evidence in favour of this interpretation. Large amplitudes come about because (a) the linear modes are non-linear solutions and (b) parasitic modes that might limit them are hampered by the stabilizing effect of rotation.
Parasitic modes in this context may not only limit the amplitudes of the VSI but also direct energy from them into the formation of non-axisymmetric structures, such as vortices. Being essentially Kelvin–Helmholtz in nature, the ‘wrapping up’ of the VSI vortex layers is a natural outcome of their evolution. As shown in Richard, Nelson & Umurhan (2016), vortex formation is key to the breakdown of axisymmetry in the VSI saturation, and hence to the possibility of any accretion. We observe that the vortices formed in our local model are not oriented flush with the orbital plane, but are aligned with the VSI flow |$\bar{\boldsymbol {u}}$|. Consequently, they are tilted upward or downward relative to the orbital plane by an angle ≈60°, and will not appear columnar as in the subcritical baroclinic instability or ‘Rossby wave’ instability (Lovelace et al. 1999; Lesur and Papaloizou 2010). Indeed, Richard, Nelson & Umurhan (2016) find that the vortex structures possess both radial and vertical variations, on some length of order 0.1H. According to our analysis this wavelength should correspond to that of the fastest growing parasites, which in turn will approximate the radial wavelength of the underlying VSI modes. This is also in keeping with the global simulations.
The second limit corresponds to a scenario in which the baroclinic driving is very weak and the VSI overpowers the vertical shear, effectively smoothing it out. Initially the VSI might achieve large amplitudes but, as the destabilizing gradient (the vertical shear) is destroyed, it will settle down into a low-amplitude sluggish state near marginal stability (as in certain simulations in Stoll and Kley 2014). In this case the saturated amplitude will be ≪Vmax. Any vortices, or other non-axisymmetric structure, created in the initial burst will ultimately die and axisymmetry will be restored. Consequently, no accretion is to be expected.
In reality, most discs at a given time will lie somewhere in between these two extremes. Detailed modelling of the baroclinic driving and a sequence of careful and detailed global simulations are needed to determine the expected range of states the VSI occupies. It should be stressed that in order to sustain vortex production (and accretion) the VSI must be permitted to achieve large amplitudes. If it is too efficient, then it will settle down into a less interesting low state.
4 VERTICAL SHEAR AND MAGNETIC FIELDS
In certain regions of a PP disc magnetic fields may have some influence, even in dead zones where the MRI is suppressed. Certainly in their upper layers, which are subject to significant photoionization, the gas may couple effectively to a mean magnetic field, which in turn may be too strong to permit the MRI but rather a magnetocentrifugal wind (Bai and Stone 2013; Bai 2014; Lesur, Kunz & Fromang 2014). We may then ask what effect does magnetism have on the onset of the VSI? Conversely, MRI-active regions may exhibit vertical shear: how would that impact on the MRI?
In this section we make a start on these questions by determining the linear response of ionized fluid pierced by a mean magnetic field. Non-ideal effects are only dealt with in passing, and could form the basis of future work.
4.1 Governing equations and magnetic equilibria
4.2 Perturbations and the dispersion relation
4.3 The MRI and vertical shear
We first examine how the MRI is altered by vertical shear. When q = 0, we reproduce the well-known results for the purely vertical field MRI, |$\boldsymbol {B}_0\propto \boldsymbol {e}_{z}$|. The fastest growing modes are channel modes, while ‘radial modes’, with kx ≠ 0, grow a factor ε slower. As explained in Latter, Fromang & Faure (2015), radial modes exhibit vertical circulation that impedes the MRI instability mechanism. An alternative way to think about this is in terms of the competition between the effects of rotation and magnetism: when kx = 0 the characteristic rate of destabilization, on account of the rotation profile, is ∝ Ω, but when kx ≠ 0 it is ∝ εΩ < Ω. The stabilizing influence of magnetic tension is accordingly more effective for a given Alfvèn frequency |$(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})$|. As a consequence of this, we expect the MRI branch of modes to be most important (and the most characteristic) for wavenumbers oriented nearly vertically, i.e. when kx ≪ kz, which is in convenient contrast to the VSI, for which the opposite limit pertains.
Furthermore, we may maximize (61) with respect to kx/kz, and find that |$s_{\rm max}= (3/4)\Omega + (5/81)q^2\Omega +\mathcal {O}(q^4)$|, assuming small q, and this occurs when kx/kz ≈ −(1/9)q. Essentially this is a channel mode, but the slightly elevated growth rate indicates that the MRI can draw some energy from the background vertical shear in addition to the radial shear, thus acting partly like the VSI. Overall, however, the fastest growing and most important MRI modes, for which kz > kx, are not especially impacted by the vertical shear, if indeed we expect q ≪ 1.
4.4 The VSI and magnetic fields
The VSI lies on the same branch of the dispersion relation as the MRI, and so it is not easy to distinguish the two: as kx/kz goes from very small to very large values the MRI smoothly morphs into the VSI. To illustrate this point we plot in Fig. 5 growth rate contours in the |$[(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})/\Omega _0,{\, } k_x/k_z]$| plane for q = 0 and q = −0.3. In the latter case we observe low growth for large kx/kz and small |$(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})/\Omega _0$|, which we associate with the VSI, and large growth for small kx/kz and |$(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})/\Omega _0\sim 1$|, which we associate with the MRI.
![Top panel: coloured contours of the MRI growth rate when q = 0 in the $[(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})/\Omega _0,{\, } k_x/k_z]$ plane. Note the symmetry about the horizontal axis. Bottom panel: contours of the MRI and VSI growth rates when q = −0.3. Observe the marked asymmetry about the horizontal axis, and the extension of growth to large kx/kz.](https://oup.silverchair-cdn.com/oup/backfile/Content_public/Journal/mnras/474/3/10.1093_mnras_stx3031/2/m_stx3031fig5.jpeg?Expires=1749877157&Signature=j8Lc9tGANoD-1nnUNiMBDyeWQeEDIgD--OlZtP6-KFjKx9ua~-2CFsNdqzs1OWnmcFVbbirpSYllaNKqIXyZihDRuU8TgrmiDr1e7YYTMF3ZhM32sTzguEoNjvmiUgqm1IclXQLPXQhW1gaFKbAw8o5QF9xVWgf96rYGoKJ0ZDjYBfwkwky7lp4PPj-HQLuiwXIM6zfScgzcR4aHPl3fSsqoZxxyPxKg5i4elzgEUBS0WcmUfIMuVg5CJ6TCpOgYNxH~as~uxCFKlZ7zNEUzsQunwXpHLYtFc6PuQ8PhPwRnjNpEkCHf4f1FxBD090miFLeGqfEAUgXg2T6PBTLWRw__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
Top panel: coloured contours of the MRI growth rate when q = 0 in the |$[(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})/\Omega _0,{\, } k_x/k_z]$| plane. Note the symmetry about the horizontal axis. Bottom panel: contours of the MRI and VSI growth rates when q = −0.3. Observe the marked asymmetry about the horizontal axis, and the extension of growth to large kx/kz.
To disentangle the VSI algebraically, we let kx/kz = −1/q, the wavevector orientation that yields maximum VSI growth in the absence of a magnetic field. Both expressions (60) and (61) should hold for such a mode. Plugging in our value for kx/kz we find that maximum growth occurs at very small values of |$(\boldsymbol {v}_{\rm A}\cdot \boldsymbol {k})^2\sim q^2$|, but with maximum growth smax = (5/4)qΩ, slightly larger than in the hydrodynamical case. This indicates that for exceedingly light magnetic tension, the VSI is slightly amplified.
4.5 Ohmic diffusion
In the dead zones of PP discs, magnetic diffusion will alter the results of the previous sections. In particular, it will weaken magnetic tension and the VSI will find it easier to grow. We now estimate how much diffusion is needed to ‘rescue’ the VSI.
To estimate Eη requires knowledge of the strength of the background vertical field. For a mid-plane β = 105, Lesur, Kunz & Fromang (2014), using the minimum-mass solar nebula, estimate that Eη < 10−4 when |z| < H at R = 1 au, and Eη = 0.1 − 1 when R = 10 au. Given that q ∼ H/R ∼ 0.05, we recognize that at 1 au the VSI is free of magnetic tension; but further out in the disc it may be worth considering the role of magnetic fields a little more closely, especially when those fields are strong.
5 CONCLUSION
In this paper we have established a number of theoretical results pertaining to the onset and saturation of the VSI in PP discs. Using the Boussinesq approximation, we show that the linear VSI modes are non-linear solutions whose spatial structure need not be limited to sinusoids. Being double-diffusive, the instability grows at its maximum rate ∼(H/R)Ω on a range of wavelengths bracketed from below by (H/R)−1/2Re−1/2H and above by (H/R)1/2Pe−1/2H, where Re and Pe are the Reynolds and Peclet numbers. On sufficiently short scales and in certain disc regions the diffusive approximation breaks down and these estimates require moderate revision. In this case, maximum growth is assured if the gas's cooling rate is much greater than (R/H)Ω (in agreement with Lin and Youdin 2015). We apply these estimates to a low-mass disc and demonstrate that the VSI is prevalent from 1 au outward, moving from shorter to longer scales with disc radius.
The VSI modes cannot grow indefinitely, as they are subject to parasitic instabilities of Kelvin–Helmholtz type. The onset of the parasites, however, is significantly delayed: axisymmetric instability is impeded by the gas's stabilizing radial angular momentum gradient, whereas non-axisymmetric instability is foiled by the disc's shear. As a consequence, the VSI achieves relatively large amplitudes before breaking down, these characterized by Rossby numbers greater than 1 and fluid velocities a few per cent or more of the sound speed. This makes a striking contrast to the convective overstability, whose amplitudes are kept generally low by parasites (Latter 2016). The delay in VSI disruption might explain some features witnessed in global simulations, such as the dominance of large amplitude linear waves, at least initially (Nelson, Gressel & Umurhan 2013). We note that our analysis strictly holds only for non-linear modes that remain shortscale, and that the body modes are not represented in a Boussinesq model. Nonetheless, the physical effects outlined above will also work on larger scales and should get in the way of their disruption as well.
The parasites may play an influential part in the VSI's subsequent saturation. If the background vertical shear is forcibly maintained by stellar irradiation, the parasites may set the amplitude of the resulting quasi-steady turbulent state. If, however, the VSI is efficient in erasing the vertical shear, they may be less important. Significantly, parasitic instabilities are the route by which the VSI's axisymmetry is broken; the subsequent turbulence may then transport angular momentum. In so doing they create vortices, not perfectly aligned with the disc plane. Vortex production is a robust process, and VSI modes on all scales can generate them. As discussed at length elsewhere, vortices can accumulate solid particles, though in this context it may be complicated by their non-trivial vertical structure. Their geometry and limited lifetime are other variables deserving of further study (Richard, Nelson & Umurhan 2016).
Finally we include magnetic fields in the analysis. Because of the vertical shear it is important to be careful to set up a meaningful time-independent magnetic equilibrium. We find that the MRI is not impacted greatly by the vertical shear, and the fastest growing modes (channel modes) are not affected at all. In contrast, the VSI is completely suppressed by magnetic tension, for (average) plasma betas below ≳ q−2 ∼ (R/H)2. Ohmic diffusion can rescue the VSI, however, if the local Elsasser number is less than q ∼ H/R.
Acknowledgements
The authors would like to thank Andrew Youdin, Adrian Barker, and the anonymous referee for useful comments that helped improve the manuscript. We also thank Tobias Heinemann for a close reading of an earlier draft. This work is partially funded through STFC grant ST/L000636/1.
REFERENCES
APPENDIX A: THE VSI WITH STRATIFICATION, COOLING, AND VISCOSITY
In this appendix we tackle the complete problem, with viscosity, vertical buoyancy, and radiative cooling in the framework of the Boussinesq approximation. Similar analyses have appeared in Urpin and Brandenburg (1998) and Urpin (2003), though the key results deserve further clarification.
These equations admit the same steady state as appearing in Section 2.2 if θ = 0. We perturb this equilibrium with perturbations as earlier, with the perturbed buoyancy |$\theta ^{\prime }= \bar{\theta }(t)f(\xi )$|, and we find that such disturbances remain non-linear solutions. However, the form of f is constrained by the Laplacians, so that f ∝ d2f/dξ2, and so only sinusoidally varying shearing waves are supported.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}