Abstract
Recent work by An and Evans has revived interest in the coordinate surfaces that lie along the principal axes of the stress tensor. Here we complete our list of non-axially symmetric systems with local integrals and prove that those principal velocity surfaces exist for all systems with three local integrals. We then demonstrate how systems in non-separable potentials evade the Eddington–An theorem by having distribution functions that lack perfect reflection symmetry in a meridional velocity component, and discuss other consequences of this remarkable theorem.
1 INTRODUCTION
This paper was stimulated by the papers of An & Evans (2016) and Evans et al. (2016) that showed an intimate relationship between steady-state stellar systems with triaxial stress tensors aligned with any triply orthogonal coordinate system (the principal velocity surfaces) and the separability of motion in the potential in those coordinates. A relationship of this kind was first found in a great paper by Eddington (1915). His theorem states that if the distribution function is an anisotropic Maxwellian (i.e. a Schwarzschild 1907 distribution) at every point and if the three different principal axes of the resulting stress tensor lie perpendicular to a set of surfaces, then those surfaces must be confocal quadrics. Furthermore, the potential must be of the form that allows the equations of motion to separate in those ellipsoidal coordinates or in degenerate forms thereof.
Later workers including Chandrasekhar (1960) generalized the Schwarzschild distribution to include a mean motion. Thus the ellipsoidal hypothesis is that the distribution function is some function of |${({\boldsymbol v}-\overline{\boldsymbol v})\cdot{\cal {\boldsymbol A}}\cdot({\boldsymbol v}-\overline{\boldsymbol v})}+B$| where |${\cal {\boldsymbol A}}({\boldsymbol r})$| is a positive definite matrix, |${\overline{\boldsymbol v}({\boldsymbol r}})$| is the mean velocity and |$B({\boldsymbol r})$| is a scalar function of position |${\boldsymbol r}$|.
Chandrasekhar (1960) virulently criticized Eddington for his unstated assumption that principal velocity surfaces existed at all. After referencing Eddington's work he writes ‘But unfortunately Eddington's treatment was based on a fundamental fallacy’, viz. the existence of principal velocity surfaces. As a counter example Chandrasekhar gave a system with helical symmetry but such a system is infinite and unrealistic. In fact, all axially symmetrical stellar systems inevitably have principal velocity surfaces and outside axial symmetry no known finite steady stellar system lacks them! Furthermore, despite his exhausting analysis Chandrasekhar (1939) appears to have missed the important separable systems found by Eddington [and now mistakenly called after Stackel (1893) who never derived them or their potentials]. I shall call these systems Eddingtonian. I have looked for these separable potentials in Chandrasekhar's voluminous paper but failed to find them although he quotes Eddington's later collaborator G.L.Clark and claims to be giving a more general treatment. In his paper Clark (1937) gives the integrals in the Eddingtonian systems. The part of my thesis (Lynden-Bell 1960) on time-dependent accretion discs was later written into a paper with Pringle (Lynden-Bell & Pringle 1974), but the major part was a redevelopment of stellar dynamics based on Jeans's theorem and integrals of motion without appeal to the restrictive ellipsoidal hypothesis.
However, I did appeal to some functional freedom in the potential within which the stars moved (Lynden-Bell 1962, hereafter Paper I). This paper correctly derived all the local integrals of axially symmetrical systems including the separable Eddingtonian systems in spheroidal coordinates. For systems lacking that symmetry it included a proof of the existence of principal velocity surfaces. However some years later, I think it was Stodolkiewicz of the Copernicus Astronomical Institute in Cracow who wrote pointing out that although my tables of local integrals gave |${\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times {\boldsymbol v}})^2-\zeta (\theta )$| as an integral in the axially symmetrical potentials ψ = η(r) + ζ(θ)/r2, they omitted the more general |${\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times {\boldsymbol v}})^2-\zeta (\theta ,\phi )$| in the potentials ψ = η(r) + ζ(θ, ϕ)/r2 that lack axial symmetry. My method ought to have found this more general case when I treated potentials out of axial symmetry. Here I find and correct the mistake that led to that omission, but, as it occurs prior to my proof of the existence of the principal velocity surfaces and the two are not unconnected, it is appropriate to revisit that also. The correction gives no extra systems other than that pointed out by Stodolkiewicz.
Appendix C of Evans et al. (2016), which is basically due to An, shows that Eddington's theorem can be proved without assuming either the ellipsoidal hypothesis or local integrals, but it requires both the existence of principal velocity surfaces and distribution functions with symmetries under the reversal of velocity components. This extended Eddington–An theorem, which is also proved in An & Evans (2016), re-emphasizes the importance of principal velocity surfaces and has remarkable consequences, but we show that it does NOT imply that all steady-state stellar systems which have stress tensors with unequal axes must have separable potentials. We also discuss some interesting unanswered questions raised by this theorem. Those less interested in local integrals or special potentials may find it useful to skip to Section 4 which concerns the application of the Eddington–An theorem to general axially symmetrical steady-state stellar systems.
2 LOCAL INTEGRALS REVISITED
My old analysis depends on the existence of local integrals, so a definition of them is needed. A stellar system that is steady as seen in fixed axes has a potential ψ = ζ(x, y, z) that is independent of time. All stars moving in this potential have their energies |$\varepsilon ={\textstyle {\frac{1}{2} }\!}{\boldsymbol v}^2-\zeta$| as integrals, i.e. constants of the motion. Likewise in potentials of the form ψ = η(r) + ζ(θ)/r2 have not only ε but also Lz = Rvϕ and |$I={\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times {\boldsymbol v}})^2-\zeta (\theta )$| as constants of motion. Here, R2 = x2 + y2. It is seen that these integrals of the motion exist for a whole class of potentials which have functional freedoms. For the energy integral we have a three-dimensional functional freedom in our choice of ζ(x, y, z). For the angular momentum about the z-axis, Lz, we have a two-dimensional functional freedom in the potential ψ = ζ(r, θ). For the integral |${\textstyle {\frac{1}{2} }\!}{({\boldsymbol r}\times {\boldsymbol v})}^2-\zeta (\theta )$| we have two one-dimensional functional freedoms ζ(θ) and η(r). A local integral is a constant of the motion for a set of Hamiltonians |$H[{\boldsymbol p,r},\zeta (\lambda )]$| which we take to be |${\textstyle {\frac{1}{2} }\!}{\boldsymbol p}^2-\psi [{\boldsymbol r},\zeta (\lambda )]$|. Here, ψ is some fixed function of its arguments and ζ is a freely variable function of its argument λ, which is a fixed function of position. The problem of finding local integrals is to determine what forms of the potential ψ and what forms of λ(x, y, z) allow integrals |$I({\boldsymbol p,r},\zeta )$| for any ζ(λ). These integrals are called local since they depend only on ζ at the point currently occupied, whereas they might have depended on ζ elsewhere, i.e. on a functional of ζ(λ).
2.1 Potentials of the form |$\psi [{\boldsymbol r},\zeta (\lambda ,\mu )]$|
First we consider potentials of the above form depending on an arbitrary function of two variables λ and μ which are assumed independent but need not have orthogonal surfaces. For
|$I[{\boldsymbol p,r},\zeta (\lambda \cdot\mu )]$| to be a conserved integral we need the Poisson bracket [
H,
I] = 0 and hence
This must hold for all ζ(λ, μ) so
If
I is of the form
|$I(H,{{\boldsymbol p}\cdot{\boldsymbol n},{\boldsymbol r}}),$| this equation becomes
which is clearly satisfied when
|${\boldsymbol n}$| is any vector parallel to ∇λ × ∇μ. For a proof that this is the general solution, see
Paper I. With
I of this form [
H,
I] = 0 gives
where
|$\nabla \psi =\mathrm{\partial} \psi /\mathrm{\partial} {\boldsymbol r}|_\zeta +\mathrm{\partial} \psi /\mathrm{\partial} \zeta \nabla \zeta$|. We now define
so equation (3) reads
This must hold for all
|${\boldsymbol p}$| and from its definition
|${\boldsymbol K}$| is a function of
|$H,{{\boldsymbol p}\cdot{\boldsymbol n},{\boldsymbol r}}$|. In
Paper I I saw that
|${{\boldsymbol p}\cdot{\boldsymbol K}}$| had to be quadratic in
|${\boldsymbol p}$| and wrongly deduced that
|${\boldsymbol K}$| should be linear in
|${\boldsymbol p}$|. The term independent of
|${\boldsymbol p}$| was also accommodated if
|${\boldsymbol K}$| took the form
|${{\boldsymbol K}= ({\boldsymbol p}\cdot{\boldsymbol n}){\boldsymbol G}({\boldsymbol r})-{\boldsymbol n}({\boldsymbol p}\cdot{\boldsymbol n})^{-1}({n}\cdot\nabla )}\psi$|. What I failed to notice was that the more general form
would also give
|${{\boldsymbol p}\cdot {\boldsymbol K}}$| quadratic in
|${\boldsymbol p}$| and the
|${\boldsymbol p}$|-independent term would be accounted for provided
It is this more general situation that we now explore. [The addition of a term in
|${ ({{\boldsymbol p}\cdot{\boldsymbol n}})}^2$| inside the square bracket of equation (6) is merely equivalent to a change in
|${\boldsymbol G}$| so is omitted without loss of generality.]
At constant
H and
|${{\boldsymbol p}\cdot{\boldsymbol n}}, \mathrm{\partial} I/\mathrm{\partial} {\boldsymbol r}$| is a pure gradient so from its definition
|${\boldsymbol K}$| is parallel to a pure gradient and therefore with those quantities held fixed
|${{\boldsymbol K}\cdot curl {\boldsymbol K}=0}$|. This holds for all
|${{\boldsymbol p}\cdot{\boldsymbol n}}$| so we deduce from (6) that
and provided that not both α and β are zero
So far
|${\boldsymbol n}$| is any vector field parallel to ∇λ × ∇μ. We now study how our equations respond if we choose instead of
|${\boldsymbol n}$| a different
|${{\boldsymbol n}^{\ast }}=\kappa ({\boldsymbol r){\boldsymbol n}}$|, where κ is any scalar function of position. We write
then
and
so
hence writing
by comparing multiples of
|${{\boldsymbol p}\cdot{\boldsymbol n}}$| and then
|${\boldsymbol n}$| we see
As this holds for all
|${{\boldsymbol p}\cdot{\boldsymbol n}}$| and all
H we deduce that
Now like the previous argument for
|${\boldsymbol G}$| we have
|${{\boldsymbol G}^{\ast }\cdot curl {\boldsymbol G}^{\ast }=0}$|, hence
but this must hold whatever we choose for κ so
|${curl {\boldsymbol G}=0}$|, which implies that
|${\boldsymbol G}$| can be written as
Using this result in equation (10) and choosing κ = γ we see that we can make
|${{\boldsymbol G}^{\ast }}=0$| and then
From the starred version of equation (5) we have, using the summation convention over repeated indices
Since
pi is arbitrary the quadratic terms in it must vanish separately so
while the terms independent of
pi give the starred version of equation (7).
Our problem now splits into three separate cases. (
i) α* ≠ 0, (
ii) α* = 0, β* ≠ 0, (
iii) α* = β* = 0. In cases (i) and (ii) we have from the starred version of equation (9)
|${{\boldsymbol n}^{\ast }\cdot curl {\boldsymbol n}^{\ast }=0}$|, which implies that
|${{\boldsymbol n}^{\ast }}=N\nabla \nu$|, where
N is a scalar function of position. Since at constant
|${{{\boldsymbol p}\cdot{\boldsymbol n}}^{\ast },\ {\boldsymbol K}^{\ast }}$| is parallel to the gradient of ν, it follows that the coefficients must be functions of ν. Thus
|$I=I(H, {{{\boldsymbol p}\cdot{\boldsymbol n}}^{\ast }},\nu )$|, and both
Nα* and
Nβ* and therefore β*/α* are all functions of ν. In considering the implications of equation (15) it is useful to think of
|${{\boldsymbol n}^{\ast }}$| as a displacement vector in space. Then
|${\textstyle {\frac{1}{2} }\!}(\mathrm{\partial} _i n^{\ast }_j+\mathrm{\partial} _j n^{\ast }_i)$| is the strain tensor due to such a displacement. If the strain were zero then the solution would be a rigid body displacement. However we see from (15) that in case (i) it is not zero but rather an isotropic expansion or contraction at each point. Such a displacement preserves angles and its divergence gives the volume expansion factor of the conformal transformation at each point of space. We show in the Appendix that the only three-dimensional conformal transformations in a flat space are uniform expansions or contractions with α* constant, or inversions with α* =
k/
r2. However we already know that
Nα* is a function of ν, so
|${{\boldsymbol n}^{\ast }}=(1/\alpha ^{\ast })\nabla \tilde{\nu }$| where
|$\tilde{\nu }$| is a function of ν. So returning to equation (15) in dyadic notation we now have with δ the unit tensor
where the suffix
S denotes that the tensor is symmetrized. We treat below the situation with α* constant and show in the Appendix that there are no solutions when α* =
k/
r2. Solving the 1,2 component we find
|$\tilde{\nu }=u_I(x_2,x_3)+u_{II}(x_1,x_3)$| but applying the 2,3 and 3,1 components this solution reduces to
|$\tilde{\nu }=u_1(x_1)+u_2(x_2)+u_3(x_3)$|. Finally applying the 1,1 2,2 and 3,3 components we find
so
Since α*
2 ≠ 0, we may take a new origin to remove the linear terms and we then find
|${\boldsymbol n}^{\ast }=(1/\alpha ^{\ast })\nabla \tilde{\nu }=-{\textstyle {\frac{1}{2} }\!}\alpha ^{\ast }{\boldsymbol r}$|. This implies that
|$\tilde{\nu },\nu$| are functions of the scalar
r. We now insert this result into equation (16) to find the form of potential involved, remembering that β*/α* must now be a function of
r too. Dividing by α* we find
|$\psi =\beta ^{\ast }/\alpha ^{\ast }-{\textstyle {\frac{1}{2} }}r\mathrm{\partial} \psi /\mathrm{\partial} r$|, hence
where η is
r−2 times the integral of 2
rβ*/α* which is a function of
r. Thus we have recovered the potential that was missing from my table in
Paper I.
The constant of the motion is most readily derived directly; writing
|${\hat{\boldsymbol r}={\boldsymbol r}}/r$|which demonstrates that
|${\textstyle {\frac{1}{2} }\!}{({\boldsymbol r}\times {\boldsymbol v}})^2-\zeta (\theta ,\phi )$| is a constant of the motion and completes case (i).
In case (ii) α* = 0 so equation (15) shows that |${{\boldsymbol n}^{\ast }}$| is a rigid displacement, however it has orthogonal surfaces since β* is not zero. The only rigid displacements with orthogonal surfaces are rigid rotation and pure displacements, so by suitably orienting our axes we may take either |${{\boldsymbol n}^{\ast }}=\Omega R \hat{{\bf \phi }}=\Omega R^2\nabla \phi$|, case (iia), or along |${\hat{\boldsymbol z}}=\nabla z$|, case (iib).
In case (iia) N = ΩR2 equation (16) gives β* = −Ω∂ψ/∂ϕ, but Nβ* = ΩR2β* is a function of |$\tilde{\nu }$|, which is now ϕ. Thus ∂ψ/∂ϕ = η′(ϕ/R2), say, so ψ = ζ(R, z) + η(ϕ) and the integral is easily found to be |${\textstyle {\frac{1}{2} }\!}(Rv_\phi )^2-\eta (\phi )$|. Case (iib) is trivial ψ = ζ(x, y) + η(z) with the integral |${\textstyle {\frac{1}{2} }\!}v_z^2-\eta (z)$|.
Finally, we come to case (iii). Here
|${{\boldsymbol n}^{\ast }}$| is a rigid displacement and
|${{\boldsymbol n}^{\ast }}\cdot\nabla \psi =0$| so the potential is unchanged along the displacement. Without loss of generality the displacement can be taken to be a displacement along the
z-axis accompanied by a rotation about that axis so the lines of the displacement are helical. The potential is of the form ψ = ζ(
x′,
y′) where
x′ =
xcos (
z/
l) +
ysin (
z/
l);
y′ = −
xsin (
z/
l) +
ycos (
z/
l) where
l is the height at which the helix has turned by one radian. By symmetry the conserved integral is a combination of the linear and angular momentum about the axis
I =
vz +
Lz/
l =
vz + (
xvy −
yvx)/
l. Instead of this symmetry argument we may calculate
thus
This is Chandrasekhar's infinite helical system on which he based his rejection of Eddington's paper.
2.2 Potentials of the form |$\psi [{\boldsymbol r},\zeta (\lambda ),\eta (\mu )]$|
In determining all the axially symmetrical local integrals in
Paper I we sought integrals in potentials with one free function of one variable but those found had two free functions. Except for those potentials allowing an integral linear in the velocities, we see this again in Table
1 in that the free functions η arose in the solutions without being requested. To gain a powerful handle on systems without axial symmetry we now seek integrals in potentials which have two free functions ζ(λ), η(μ) of two independent variables λ, μ. We shall not require λ and μ to have orthogonal surfaces but shall show shortly that such an existence of the type of integral sought enforces that. We shall require that the potentials are not merely special cases of the systems given in Table
1 since the arbitrary functions, ζ, of two variables can be chosen as two functions each of a different single variable in many ways. Such systems would merely give us back special cases of the systems in Table
1. We now look for an integral
|$I=I({{\boldsymbol p},{\boldsymbol r}},\zeta ,\eta )$| in all the potentials of the form
|$\psi [{\boldsymbol r},\zeta (\lambda ),\eta (\mu )]$|. The condition that the Poisson bracket [
H,
I] = 0 for all ζ and all η leads to, cf. equation (2),
The two terms must vanish separately since λ and μ are independent. At any point let
|$p_\Lambda$| be the component along ∇λ and
pn be the component along ∇λ × ∇μ and let
p2 be the component along an axis perpendicular to those. Then the vanishing of the first term above implies that
I only involves ζ via
H so it must be of the form
I =
I(1)(
H,
p2,
pn, η) while the vanishing of the second implies the form
|$I=I^{(2)}(H,\ a p_2+b p_\Lambda ,\ p_n,{\boldsymbol r},\zeta )$| where
|$a p_2+b p_\Lambda$| is the component perpendicular to ∇μ and
a and
b are direction cosines. Now in
|$I^{(1)},\ p_\Lambda$| is only involved via its square through
H, while in
I(2) it appears in linear combination with
p2. These can only be consistent if (1)
b = 0 or (2)
I(2) is independent of its second argument or (3)
a = 0 and
I(2) is only dependent on the square of that argument. Option (1) has ∇μ parallel to ∇λ, which is forbidden as they have to be independent. Option (2) leaves I of the form that we investigated in the last section and gives nothing new, so we are left with option (3)
a = 0 which implies
|$p_\Lambda$| and
pn are perpendicular to ∇μ and ∇μ.∇λ = 0. Thus we may call
p2,
pM, where this
M is a capital Mu, and the surfaces of constant λ and constant μ are orthogonal. To get a triply orthogonal coordinate system we still have to prove that
|${\boldsymbol n}$| is orthogonal to a set of surfaces. With minor redefinition we can now write
|$I=I^{(1)}(H,p_M^2,p_n,{\boldsymbol r},\eta )=I^{(2)}(H,p_\Lambda ^2,p_n,{\boldsymbol r},\zeta )$|. In
|$I^{(1)}, p_\Lambda$| and ζ are only involved in the combination that is in
|$H, {\textstyle {\frac{1}{2} }\!}p_\Lambda ^2-\psi [{\boldsymbol r},\zeta (\lambda ),\eta (\mu )]$|. However
I(2) cannot be independent of its second argument for the reasons given above, so it involves
|$p_\Lambda ^2,{\boldsymbol r}$| and ζ without η. This can only happen if some combination of
|${\textstyle {\frac{1}{2} }\!}p_\Lambda ^2-\psi [{\boldsymbol r},\zeta (\lambda ),\eta (\mu )],{\boldsymbol r},\eta$| is independent of η for all
|$p_\Lambda$|. This only occurs if
|$\psi ({\boldsymbol r},\zeta ,\eta )$| separates in the form
|$\psi =\psi ^{(1)}({\boldsymbol r},\zeta )+\psi ^{(2)}({\boldsymbol r},\eta )$| for then
Table 1.Potentials with free ζ(λ, μ), η(ν) and their local integrals. R2 = x2 + y2.
| Potential ψ
. | Integrals
. |
|---|
| ζ(x, y, z) | |$\varepsilon ={\textstyle {\frac{1}{2} }\!}{\boldsymbol v}^2-\zeta$| |
| η(r) + ζ(θ, ϕ)/r2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times v})^2-\zeta (\theta ,\phi )$| |
| ζ(R, z) + η(ϕ)/R2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}R^2 v_\phi ^2-\eta (\phi )$| |
| ζ(x, y) + η(z) | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}v_z^2-\eta (z)$| |
| ζ(R, z) | ε, Rvϕ |
| ζ(x, y) | ε, vz |
| ζ(x′, y′) | ε, vz + Rvϕ/l. |
| Potential ψ
. | Integrals
. |
|---|
| ζ(x, y, z) | |$\varepsilon ={\textstyle {\frac{1}{2} }\!}{\boldsymbol v}^2-\zeta$| |
| η(r) + ζ(θ, ϕ)/r2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times v})^2-\zeta (\theta ,\phi )$| |
| ζ(R, z) + η(ϕ)/R2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}R^2 v_\phi ^2-\eta (\phi )$| |
| ζ(x, y) + η(z) | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}v_z^2-\eta (z)$| |
| ζ(R, z) | ε, Rvϕ |
| ζ(x, y) | ε, vz |
| ζ(x′, y′) | ε, vz + Rvϕ/l. |
Table 1.Potentials with free ζ(λ, μ), η(ν) and their local integrals. R2 = x2 + y2.
| Potential ψ
. | Integrals
. |
|---|
| ζ(x, y, z) | |$\varepsilon ={\textstyle {\frac{1}{2} }\!}{\boldsymbol v}^2-\zeta$| |
| η(r) + ζ(θ, ϕ)/r2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times v})^2-\zeta (\theta ,\phi )$| |
| ζ(R, z) + η(ϕ)/R2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}R^2 v_\phi ^2-\eta (\phi )$| |
| ζ(x, y) + η(z) | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}v_z^2-\eta (z)$| |
| ζ(R, z) | ε, Rvϕ |
| ζ(x, y) | ε, vz |
| ζ(x′, y′) | ε, vz + Rvϕ/l. |
| Potential ψ
. | Integrals
. |
|---|
| ζ(x, y, z) | |$\varepsilon ={\textstyle {\frac{1}{2} }\!}{\boldsymbol v}^2-\zeta$| |
| η(r) + ζ(θ, ϕ)/r2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}({{\boldsymbol r}\times v})^2-\zeta (\theta ,\phi )$| |
| ζ(R, z) + η(ϕ)/R2 | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}R^2 v_\phi ^2-\eta (\phi )$| |
| ζ(x, y) + η(z) | |$\varepsilon ,{\textstyle {\frac{1}{2} }\!}v_z^2-\eta (z)$| |
| ζ(R, z) | ε, Rvϕ |
| ζ(x, y) | ε, vz |
| ζ(x′, y′) | ε, vz + Rvϕ/l. |
Thus we may express
I in either of the forms
3 The existence of Eddington's principal velocity surfaces
Henceforth we write
|${\hat{\boldsymbol \lambda }},{\hat{\boldsymbol \mu }}$| for the unit vectors parallel to ∇λ and ∇μ, respectively, and we set
|${\boldsymbol n}={\hat{\boldsymbol \lambda }}\times {\hat{\boldsymbol \mu }}$| so that it too is a unit vector. We write
I in the form
|$I(H,{\textstyle {\frac{1}{2} }\!}({\boldsymbol p}\cdot{\hat{\boldsymbol \lambda }})^2-\psi ^{(1)},{{\boldsymbol p}\cdot{\boldsymbol n}},{\boldsymbol r})$| and use a suffix 2 to denote its differentiation with respect to its second argument, etc. As in
Paper I we pick out from [
H,
I] = 0 those terms that reverse sign when
|$p_\Lambda \rightarrow -p_\Lambda$| and also reverse sign when
pM → −
pM. Since [
H,
I] = 0 for all
|${\boldsymbol p}$| these terms are also zero. They give
This involves the symmetry exploited by An. We now show that the coefficient of
I3 is zero. Since
|${\hat{\boldsymbol \lambda }}\cdot{\hat{\boldsymbol \mu }}=0$|,
Taking the dot product with
|${\boldsymbol n}$| and exchanging the dot and the times in the first two terms they become
|${\hat{\boldsymbol \mu }}\cdot {\bf curl} {\hat{\boldsymbol \mu }}$| and
|$-{\hat{\boldsymbol \lambda }}\cdot{\bf curl} {\hat{\boldsymbol \lambda }}$| both of which are zero since
|${\hat{\boldsymbol \lambda }},{\hat{\boldsymbol \mu }}$| have orthogonal surfaces. We are left with
But since
|${\hat{\boldsymbol \mu }}\cdot{\boldsymbol n}=0,$|Using this and the similar relationship with the roles of |${\hat{\boldsymbol \mu }}$| and |${\hat{\boldsymbol \lambda }}$| reversed, equation (23) becomes
so the coefficient of I3 vanishes.
Following the argument on
|$\nabla ({\hat{\boldsymbol \lambda }}\cdot{\hat{\boldsymbol \mu }})$| above we look at
|$\nabla ({\hat{\boldsymbol \mu }}\cdot{\boldsymbol n})$| and find
But
which should be compared with the coefficient of
I2 in equation (22). So using equation (24) equation (22) becomes
Now
I2 = 0 only leads us back to our former discussion of integrals depending on a free function of two variables and special cases thereof. To get an integral not contained therein we need
I2 ≠ 0 in which case
|${{\boldsymbol n}\cdot curl\ {\boldsymbol n}=0}$|, so
|${\boldsymbol n}$| has orthogonal surface and those together with λ, μ form a triply orthogonal coordinate system. It is then possible to introduce their canonical momenta rather than the momentum components
|$p_\Lambda ,\ p_M,\ p_n$| used above. With such surfaces one may prove Eddington's theorem without the ellipsoidal hypothesis and find the separable potentials and the integrals as was done earlier in my thesis and as sketched in
Paper I.
Beside G.L. Clark's work there are fine explorations of these systems particularly by Kuzmin (1952) which were later extended by Tim De Zeeuw (1985a,b). An axially symmetrical potential with three integrals that are not in involution, which was mentioned in Paper I as having a non-axially symmetrical integral, is discussed in Lynden-Bell & Booth (2009). Local integrals in systems with vector potentials are catalogued in Lynden-Bell (2000). Configuration invariants e.g. integrals that exist for one value of the energy only, are given for two-dimensional systems in Hall (1985) and were discussed earlier by Stodolkiewicz (1974). In axially symmetric potentials the effective potential contains |${\textstyle {\frac{1}{2} }\!} L_z^2/R^2$|. Although this separates in the classical spheroidal coordinates it does not separate in the conformally related coordinates used by Hall, so his configuration invariants applied to three-dimensional but axially symmetric systems can only hold for one value of the angular momentum as well as one energy.
4 TOO TRUE TO BE GOOD
We return to the theorem of appendix C of Evans et al. This we apply to axially symmetrical steady-state stellar systems which have unequal principal stresses and inevitably have principal velocity surfaces. The stars can consist of tracers since no assumption of self-gravitation is involved. These tracers can be any steady-state subsystem e.g. stars defined by a definite metal abundance or even stars on a particular axially symmetric class of orbits. If the coordinates defining the principal velocity surfaces are called λ, μ, ϕ a relevant version of the theorem shows that provided the distribution function depends only on the square of pλ rather than pλ itself, then the potential in which those tracer stars move MUST be of the separable Eddingtonian form ψ = [ζ(λ) − η(μ)]/(λ − μ) and λ, μ must be spheroidal coordinates. This sounds too good to be true but it is really too true to be useful. Take a smooth axially symmetrical potential NOT of the special separable Eddingtonian form that gives a third local integral. Release into it a number of stars with low angular momenta given their positions of release. Let these stars have negligible total mass. Although such a system never reaches a steady state, nevertheless after a long time the system will ‘converge in the mean’ to one. Following the early work of Contopoulos (1960) and later work by Henon (1976) we now know that despite the non-separability of the motions nevertheless most stars will have effective third integrals which will preserve the strong radial motions that they have initially. Thus, as in systems constructed under Schwarzschild's precepts they will generate steady axially symmetric systems with tri-axial stress tensors. These will have principal velocity surfaces because of the axial symmetry. However the potential will not be of the separable Eddingtonian type since we specified the potential so. Although such systems may appear to contradict the theorem of appendix C in Evans et al. the devil lurks in the detail. The proof of the theorem requires symmetry of the distribution function under the operation vλ → −vλ. What is really proved is that such symmetries in the distribution function can only occur for the separable systems. The systems constructed in non-separable potentials will have effective third integrals but will lack the vλ → −vλ symmetry about the λ principal velocity surface. The theorem does not dictate the form of the potential but rather it tells us that this symmetry in the distribution function is a unique property of separable systems. While this is itself remarkable and interesting it does not tell us that all reasonable stellar systems should have separable potentials. However, the Eddington–An theorem raises questions about possible forms for the principal velocity surfaces. Can they be cylindrical everywhere as postulated by Cappellari (2008) without having the vR ⇒ −vR symmetry which implies that the potential is separable and of the unacceptable form ψ = ψ1(R) + ψ2(z). Indeed, if we postulate that the principal velocity surfaces are prolate spheroidal coordinates are there non-separable potentials which give steady states with such surfaces? We could ask the same question of non-spherical systems that have spherical principal velocity surfaces and here we should have regard to appendix A of Evans et al. which shows that systems with spherically separable potentials in their outer parts can have finite central densities. Whereas exact distribution functions inevitably give solutions to Jeans's equations of stellar hydrodynamics a solution of the latter does not guarantee the existence of a distribution function that generates it. In separable potentials the turn-around surfaces of the different orbits coincide with the principal velocity surfaces. This is not true of the orbits in non-separable potentials and typically each orbit has a characteristic turn-around surface (defined by the edges of its toroidal box) shared by no other. Thus it may prove very difficult if not impossible to construct a non-separable potential in which the stars move to give a specified shape for the principal velocity surfaces. Thus despite the non-separable example given above, the exact shape of the principal velocity surfaces everywhere may have some information about the potential in which the stars move. This calls for a thorough investigation of the forms of the principal velocity surfaces of different steady states of trace distributions in say an axially symmetric potential which is far from separable. Even with a given potential such surfaces may differ significantly due to the different trace populations of the various orbits. There is no need for the gravity of the tracer stars to be considered, so this project is a relatively simple computer exercise. What is needed is a full catalogue of orbits which can then be assigned different weights for the different realizations of steady tracer systems. For each such realization the principal velocity surfaces can then be determined and these can then be compared. Indeed, principal velocity surfaces can be defined for each orbit and these can be compared. The almost trivial example of this with just two orbits is explored below to demonstrate that the vλ → −vλ symmetry of the distribution function is not present for two orbits in a non-separable potential.
5 A SIMPLE EXAMPLE
Wyn Evans thought that my case would be fully convincing only if I computed an example to show that a steady system in a non-separable potential lacked the reflection symmetry in its distribution function. As our non-separable potential we take a thickened
Vc =
constant infinite disc.
This disc is of the type discussed by Toomre (
1982) which as ϵ → 0 becomes the infinite Mestel (
1963) disc. We set
Vc = 200 km s
−1 and ϵ = 0.1. Our stellar subsystem consists of many stars uniformly distributed in phase and azimuthal angle on just two orbits. Orbit 1 is computed starting at the point
R = 1,
z = 0.3 with velocity
vR = 80,
vϕ = 100,
vz = 40 km s
−1. Fig.
1 shows the path traced by this orbit in a meridional plane that rotates around the axis to keep up with the star. Orbit 2 is computed starting at the same point with smaller meridional velocity
vR = 50,
vϕ = 100,
vz = 25 but the same initial
vz/
vR ratio of 0.5. Fig.
2 shows this orbit analogously to Fig.
1. We can imagine our system to consist predominantly of stars on orbit 1. By conservation of energy and angular momentum each orbit has the same speed and the same meridional speed each time it revisits the starting point. The ratio
vz/
vR can be its starting value 1/2 or a value determined numerically when this ratio has a negative sign. In practice the existence of an adelphic third integral (Whittaker
1904) allows only one negative value for that ratio for these orbits which is −0.44 for orbit 1 with a numerical error of the order of 0.003. One sees by inspection of the figures that there are only two lines crossing in the neighbourhood of the starting point. For orbit 2 the
vz/
vR ratio is −0.59 with an error of 0.003. Thus although each orbit starts with the same
vz/
vR ratio when it returns with a negative ratio the two orbits do so at different ratios corresponding to different angles to the axis of the system. This demonstrates that the velocity ellipsoids of these orbits at the point (1,0.3) are at an angle to one another. That demonstrates that a system predominantly composed of orbit 1 with a small admixture of orbit 2 will not have the
vλ → −
vλ symmetry of its distribution function about the principal velocity surface. In practice the stars do not return exactly to the starting point and in practice there are computational errors that accumulate as each orbit is continued. The starting velocities have been chosen to give orbits that return close enough to the initial point to give a well-determined ratio soon enough that computational errors do not vitiate the results. Details of the results are given in Table
2 in which the velocities (but not their ratio) have been rounded to the nearest km s
−1. From these results for orbit 1 it is clear that returns with a negative ratio give that ratio to be close to −0.44 which is clearly different in modulus from the starting positive value of 0.5. For Orbit 2 the negative return ratio is always close to −0.59 which is clearly different from the −0.44 ratio found for orbit 1. The results show that returns can have both meridional velocity components reversed in sign but these still give a consistent answer. Thus on each chosen orbit there are four possible velocities that a star can take in a small neighbourhood of any point but only two values of the ratio
vz/
vR. It is those velocities that define the velocity ellipsoid of the orbit at that point. The last entry in the table shows a return very close to the starting point with a velocity ratio of 0.498 in place of the original 0.5 despite quite a long integration to
t = 0.2533 which may be compared to the longest of the return times in the table of 0.3596. This gives an indication of the integration errors. Not all orbits give toroidal box Lissajoux figures like Figs
1 and
2. Fig.
3 shows one with starting from the same point with velocity
vR = 74.2,
vϕ = 100,
vz = 37.1 km s
−1 intermediate to the others but trapped in a resonance. It has been computed for the same time
t = 1.2 as the orbits shown in the other figures.
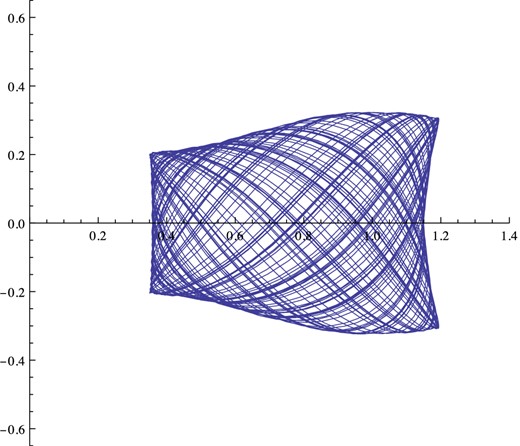
Figure 1.
Lissajoux figure traced by orbit 1 in a rotating meridional plane. Notice that only two lines cross at each point near the starting point (1,0.3). These are at angles to the axis corresponding to the starting vz/vR = 0.5 and the computed −0.44.
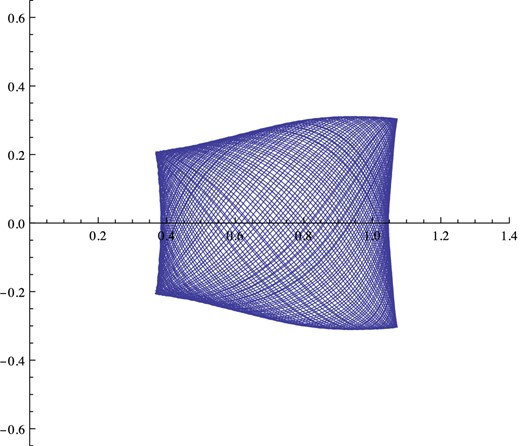
Figure 2.
Lissajoux figure traced by orbit 2 in a rotating meridional plane. Close to the starting point vz/vR = 0.5 or the computed −0.59.
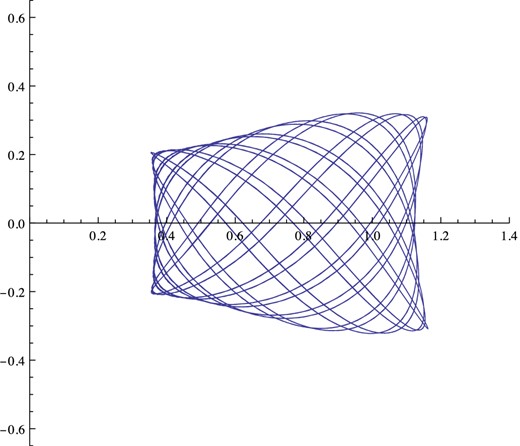
Figure 3.
Figure traced in a rotating meridional plane for an intermediate but resonant orbit. It has been computed for the same time as the other figures but the orbit retraces the same path rather than infilling the gaps.
Table 2.Orbital returns n = number of orbit.
| n
. | t
. | R
. | z
. |
|---|
|
. | vR
. | vz
. | vR/vz
. |
|---|
| 1 | 0 | 1 | 0.3 |
| 80 | 40 | 0.5 |
| 1 | 0.2083 | 0.991 | 0.298 |
| 84 | −37 | −0.440 |
| 1 | 0.3596 | 0.992 | 0.298 |
| 84 | −37 | −0.437 |
| 2 | 0 | 1 | 0.3 |
| 50 | 25 | 0.5 |
| 2 | 0.0934 | 0.987 | 0.298 |
| −53 | 31 | −0.595 |
| 2 | 0.1070 | 1.011 | 0.302 |
| 44 | −26 | −0.589 |
| 2 | 0.1463 | 1.011 | 0.302 |
| −44 | 26 | −0.594 |
| 2 | 0.2533 | 1.000 | 0.300 |
| −50 | −25 | 0.498 |
| n
. | t
. | R
. | z
. |
|---|
|
. | vR
. | vz
. | vR/vz
. |
|---|
| 1 | 0 | 1 | 0.3 |
| 80 | 40 | 0.5 |
| 1 | 0.2083 | 0.991 | 0.298 |
| 84 | −37 | −0.440 |
| 1 | 0.3596 | 0.992 | 0.298 |
| 84 | −37 | −0.437 |
| 2 | 0 | 1 | 0.3 |
| 50 | 25 | 0.5 |
| 2 | 0.0934 | 0.987 | 0.298 |
| −53 | 31 | −0.595 |
| 2 | 0.1070 | 1.011 | 0.302 |
| 44 | −26 | −0.589 |
| 2 | 0.1463 | 1.011 | 0.302 |
| −44 | 26 | −0.594 |
| 2 | 0.2533 | 1.000 | 0.300 |
| −50 | −25 | 0.498 |
Table 2.Orbital returns n = number of orbit.
| n
. | t
. | R
. | z
. |
|---|
|
. | vR
. | vz
. | vR/vz
. |
|---|
| 1 | 0 | 1 | 0.3 |
| 80 | 40 | 0.5 |
| 1 | 0.2083 | 0.991 | 0.298 |
| 84 | −37 | −0.440 |
| 1 | 0.3596 | 0.992 | 0.298 |
| 84 | −37 | −0.437 |
| 2 | 0 | 1 | 0.3 |
| 50 | 25 | 0.5 |
| 2 | 0.0934 | 0.987 | 0.298 |
| −53 | 31 | −0.595 |
| 2 | 0.1070 | 1.011 | 0.302 |
| 44 | −26 | −0.589 |
| 2 | 0.1463 | 1.011 | 0.302 |
| −44 | 26 | −0.594 |
| 2 | 0.2533 | 1.000 | 0.300 |
| −50 | −25 | 0.498 |
| n
. | t
. | R
. | z
. |
|---|
|
. | vR
. | vz
. | vR/vz
. |
|---|
| 1 | 0 | 1 | 0.3 |
| 80 | 40 | 0.5 |
| 1 | 0.2083 | 0.991 | 0.298 |
| 84 | −37 | −0.440 |
| 1 | 0.3596 | 0.992 | 0.298 |
| 84 | −37 | −0.437 |
| 2 | 0 | 1 | 0.3 |
| 50 | 25 | 0.5 |
| 2 | 0.0934 | 0.987 | 0.298 |
| −53 | 31 | −0.595 |
| 2 | 0.1070 | 1.011 | 0.302 |
| 44 | −26 | −0.589 |
| 2 | 0.1463 | 1.011 | 0.302 |
| −44 | 26 | −0.594 |
| 2 | 0.2533 | 1.000 | 0.300 |
| −50 | −25 | 0.498 |
REFERENCES
1960
Principles of Stellar Dynamics
Dover
NY
132
1960
Z. Astrophys.
49
273
1976
Commun. Math. Phys.
50
69
1952
Proc. Tartu Obs.
32
332
1960
Thesis, Stellar and Galactic Dynamics
Cambridge Univ. Library
Cambridge
1907
Goettingen Nachr. 614
1904
Analytical Dynamics (para.191)
Cambridge Univ. Press
Cambridge
APPENDIX A: CONFORMAL TRANSFORMATIONS IN FLAT 3-SPACE
Two spaces with metrics
ds2 =
gμνdxμdxν and
|$d\bar{s}^2$| will preserve angles at corresponding points if locally they are related by an isotropic magnification, i.e.
|$d\bar{s}^2=e^{2U} ds^2$| where
U =
U(
x,
y,
z). We find in books on relativity that the Ricci tensors
Rab of two three-dimensional conformally related spaces are related by
We are concerned with a conformal transformation within a flat space so
|$\bar{R}_{ab}=R_{ab}=0$| and the covariant derivatives, (;), become ordinary derivatives (,) in Cartesian coordinates. Thus the 1,2 component of A1 is
Provided ∂U/∂y ≠ 0 we have ∂/∂x(ln ∂U/∂y) = ∂U/∂x so
where the last term is the ‘constant’ of integration. Exponentiating, multiplying by
e−U and then integrating we find
e−U = −
F(
y,
z) +
G(
x,
z) so the dependence on
y and
x must occur in separate terms. But we have similar equations from the
y,
z and the
z,
x components hence
x,
y,
z must occur separately
The
xx,
yy and
zz components of equation (A1) give
from which it follows that
X′ =
Y′ =
Z′ = 2
C, say. When
C ≠ 0 we may shift the origin appropriately so that
X =
Cx2 +
const. Similarly
Y =
Cy2 + const etc. so
X +
Y +
Z =
Cr2 +
const. Multiplying up the first and last expressions in A3 we find that the constant must vanish, so provided
C ≠ 0,
eU = 1/(
Cr2). When
C = 0 we see from equation (A4) that the only solution is that
X,
Y,
Z are constant so
eU is constant and the expansion is uniform everywhere. This situation is treated in the main body of this paper. Here we consider the conformal transformation
eU = 1/(
Cr2) which is the conformal factor corresponding to an inversion. This conformal length-scale factor corresponds to a volume factor 1/(
C3r6) and this must equal the divergence of the strain generated which is − (3/2)α* from the contraction of equation (15). We therefore put α* =
k/
r6 in equation (17) which we expand in spherical polar coordinates. Using hats to denote unit vectors, the
|$\hat{{\boldsymbol r}}\hat{{\boldsymbol \theta }}$| or 1,2 component of that equation gives
which integrates to give
|$\tilde{\nu }=\nu _I(r,\phi )+\nu _{II}(\theta ,\phi )/r^2$|. From the 1,1 and 2,2 spherical polar components of equation (17) we find
hence writing
|$\tilde{\nu }$| in terms of ν
I and ν
IIOn the left we have a function of
r, ϕ while on the right is a function of θ, ϕ so both must be a function,
a(ϕ) of ϕ alone. We may then integrate to find
|$\nu _I=-\textstyle {\frac{1}{4}\!}( a r^{-2}+b r^{-4}+c)$| where
a,
b,
c can be functions of ϕ. We now return to the second equality in equation (A5) which now reads
since νII is independent of r, the r dependencies show that k = 0; so no conformal transformation of the inversion class can satisfy equation (17).
© 2016 The Author Published by Oxford University Press on behalf of the Royal Astronomical Society







{kind=link}
{kind=link}
{kind=link}