





Abstract
In a hot, dilute, magnetized accretion flow, the electron mean-free path can be much greater than the Larmor radius, and thus thermal conduction is anisotropic and along the magnetic field lines. In this case, if the temperature decreases outward, the flow may be subject to a buoyancy instability – the magnetothermal instability (MTI). The MTI amplifies the magnetic field, and aligns the field lines with the radial direction. If the accretion flow is differentially rotating, a magnetorotational instability (MRI) may also be present. Using two-dimensional, time-dependent magnetohydrodynamic simulations, we investigate the interaction between these two instabilities. We use global simulations that span over two orders of magnitude in radius, centred on the region around the Bondi radius where the infall time of gas is longer than the growth time of both the MTI and MRI. A significant amplification of the magnetic field is produced by both instabilities, although we find that the MTI and MRI primarily amplify the radial and toroidal components of the field, respectively. Most importantly, we find that if the MTI and MRI can amplify the magnetic energy by factors of Ft and Fr, respectively, then when the MTI and MRI are both present, the magnetic energy can be amplified by a factor of Ft·Fr. Therefore, we conclude that the amplification of the magnetic energy by the MTI and MRI operates independently. We also find that the MTI contributes to the transport of angular momentum, because radial motions induced by the MTI increase the Maxwell (by amplifying the magnetic field) and Reynolds stresses. Finally, we find that thermal conduction decreases the slope of the radial temperature profile. The increased temperature near the Bondi radius decreases the mass accretion rate.
1 INTRODUCTION
Hot, diffuse accretion flows are likely to be present in low-luminosity active galactic nuclei (AGNs) and the quiescent and hard states of black hole X-ray binaries (Narayan 2005; Yuan 2007; Narayan & McClintock 2008). When the mass accretion rate is very low, the electron mean-free path will be very large, so the accreting plasma is nearly collisionless. For example, from Chandra observations of the accretion flow at the Galactic Centre, Sgr A*, the electron mean-free path is estimated to be 0.02–1.3 times the Bondi radius (∼105–106 Schwarzschild radii). In such cases, thermal conduction can have a significant influence on the dynamics (Quataert 2004; Johnson & Quataert 2007), resulting in the transport of thermal energy from the inner (hotter) to the outer (cooler) regions. If the energy flux carried by thermal conduction is substantial, the temperature of the gas in the outer regions can be increased above the virial temperature. Thus, gas in the outer regions is able to escape from the gravitational potential of the central black hole and form outflows, significantly decreasing the mass accretion rate (Tanaka & Menou 2006; Johnson & Quataert 2007).
Time-dependent hydrodynamical simulations of hot accretion flows show that they are convectively unstable, no matter whether the flow is radiatively inefficient (Igumenshchev & Abramowicz 1999, 2000; Stone, Pringle & Begelman 1999) or efficient (Yuan & Bu 2010). This is consistent with the prediction of one-dimensional analytical models of advection-dominated accretion flows (ADAFs; Narayan & Yi 1994, 1995). Convective instability occurs because the entropy of the flow increases in the direction of gravity. However, in a magnetized weakly collisional accretion flow, in which the electron mean-free path is much greater than the Larmor radius, thermal conduction is anisotropic and primarily along the magnetic field lines. In this case, Balbus (2000, 2001) found that the stability criterion for convection is fundamentally altered: convection occurs when the temperature – not the entropy – increases in the direction of gravity. Convective instabilities in this regime are referred to as the magnetothermal instability (MTI).
In a weakly magnetized, non-rotating atmosphere, local simulations have demonstrated that the MTI can amplify the magnetic field and lead to a substantial convective heat flux (Parrish & Stone 2005, 2007). Sharma, Quataert & Stone (2008, hereafter SQS08) investigated the effects of the MTI on accretion flows in two dimensions using global simulations in spherical polar coordinates. Their simulations focused on the region around the Bondi radius, where the MTI growth time is shorter than the gas infall time. They found that the MTI can amplify the magnetic field and align field lines with the direction of the temperature gradient (radially), consistent with the results obtained by previous local simulations. The effects of the MTI on the intracluster medium (ICM) have also been investigated (Parrish, Stone & Lemaster 2008). In that study also, the MTI drives the magnetic field lines to be radial, leading to a conductive flux, which is an appreciable fraction of the classical Spitzer value. Such a high rate of thermal conduction makes the slope of the temperature profile flatter.
The studies of the MTI described above all focus on a non-rotating accretion flow. It is well known that in a weakly magnetized, differentially rotating hot accretion flow, the magnetorotational instability (MRI; Balbus & Hawley 1991, 1998) will be present. Also, magnetohydrodynamics (MHD) turbulence driven by the MRI is thought to be the most promising mechanism of angular momentum transport. In principle, the MTI and MRI should coexist in such flows. Therefore, an interesting question for investigation is whether the MTI and MRI interact with one another; that is, does one instability enhance or suppress the other, or do the two instabilities operate entirely independently? For example, it is interesting to ask whether convective motions driven by the MTI can transport angular momentum, and similarly whether turbulent motions driven by the MRI can transport heat.
Motivated by the question above, we present the results of a two-dimensional MHD simulation of hot accretion flows with anisotropic thermal conduction and rotation. We investigate flows that are slowly rotating (not rotationally supported) at the Bondi radius, where the growth times of both the MTI and MRI are shorter than the infall time. This paper is organized as follows. We introduce our numerical methods and initial conditions in Section 2. Most of our results are presented in Section 3, while Section 4 is devoted to a summary and discussion.
2 NUMERICAL SIMULATION

 is the unit vector along magnetic field and T is the temperature of the gas.
is the unit vector along magnetic field and T is the temperature of the gas.For convenience, we adopt χ=κp/T and assume that κ=ac(GMr)1/2, which has the dimension of a diffusion coefficient (cm2 s−1). Anisotropic thermal conduction is implemented using the method based on limiters (Sharma & Hammett 2007) to guarantee that heat always flows from hot to cold regions.
We initialize our simulations as follows. The radial velocity, internal energy and density of the accretion flow are adopted from the hydrodynamic Bondi solution. For the other two components of the velocity (vθ and vϕ), we set vθ = 0 and vϕ=l0/r where l0 (= const.) – a parameter of our simulations – is the specific angular momentum of the accretion flow. The initial magnetic field is uniform and perpendicular to the equatorial plane (i.e. B=Bz, where z is the vertical cylindrical coordinate). We have run four models. The parameters used in these models are listed in Table 1. In models L1 and L2, we set l0 to be 0.1 times the Keplerian angular momentum at the inner boundary. Thus, in models L1 and L2, the centrifugal barrier is inside our inner boundary, and a rotationally supported region is never formed in these two models. In models H1 and H2, however, we set l0 to be 10 times the Keplerian angular momentum at the inner boundary. Thus, in models H1 and H2, the centrifugal barrier is outside our inner boundary, so that a rotationally supported disc can form, which is subject to the MRI. We set β (the ratio of gas pressure to magnetic pressure) to be β = 1012 at the outer boundary in our initial conditions. We assume that the adiabatic index γ = 1.5. We use the Bondi radius, rB=GM/c2∞ (c∞ is the sound speed at infinity, and we set c2∞ = 10−6c2 where c is the speed of light) to normalize all of the length-scales in our paper. Times reported in this paper are all in units of the inverse rotation frequency at the outer radius of the domain, Ω−1out = (r3out/GM)1/2.
Parameters for all of our models.
| Model | la0 | abc | Description |
| L1 | 0.1lin | 0 | No MTI, no MRI |
| L2 | 0.1lin | 0.2 | Only MTI |
| H1 | 10lin | 0 | Only MRI |
| H2 | 10lin | 0.2 | With MRI, with MTI |
| Model | la0 | abc | Description |
| L1 | 0.1lin | 0 | No MTI, no MRI |
| L2 | 0.1lin | 0.2 | Only MTI |
| H1 | 10lin | 0 | Only MRI |
| H2 | 10lin | 0.2 | With MRI, with MTI |
al0 is the initial angular momentum of the flow and lin is the Keplerian angular momentum at the inner boundary.
bχ=κp/T is the thermal diffusivity and κ=ac(GMr)1/2.
Parameters for all of our models.
| Model | la0 | abc | Description |
| L1 | 0.1lin | 0 | No MTI, no MRI |
| L2 | 0.1lin | 0.2 | Only MTI |
| H1 | 10lin | 0 | Only MRI |
| H2 | 10lin | 0.2 | With MRI, with MTI |
| Model | la0 | abc | Description |
| L1 | 0.1lin | 0 | No MTI, no MRI |
| L2 | 0.1lin | 0.2 | Only MTI |
| H1 | 10lin | 0 | Only MRI |
| H2 | 10lin | 0.2 | With MRI, with MTI |
al0 is the initial angular momentum of the flow and lin is the Keplerian angular momentum at the inner boundary.
bχ=κp/T is the thermal diffusivity and κ=ac(GMr)1/2.
All of our calculations span a domain bounded by an inner boundary at rin = 0.05rB and an outer boundary at 20rB. As in SQS08, we adopt a numerical resolution of 60 × 44. The radial grid is logarithmically spaced. A uniform polar grid extends from θ = 0 to π. At the poles, we use axisymmetric boundary conditions. In the radial direction, we use inflow/outflow boundary conditions at both the inner and outer boundaries. For the temperature at the inner and outer boundaries, we use outflow boundary conditions.
3 RESULTS
3.1 Magnetic field amplification


 is the Alfvén speed.
is the Alfvén speed.We investigate the interplay between the MTI and MRI by examining the magnetic field amplification by the two instabilities. Note that, in addition to the MTI and MRI, the magnetic field can also be amplified by the geometric convergence of the accretion flow in spherical geometry and flux freezing. First, we investigate the magnetic field amplification by flux freezing by carrying out model L1. We note that in models L1 and L2, the centrifugal barrier is inside our inner boundary, and thus the time-scale for the MRI to grow is much longer than the gas infall time-scale. Furthermore, in model L1, we set the coefficient of the thermal diffusivity ac = 0 (i.e. there is no MTI in model L1). Therefore, the magnetic field amplification in model L1 can only be a result of flux freezing. The results show that the effect of flux freezing on magnetic field amplification is very small, allowing us to ignore this effect in the analysis of models L2, H1 and H2.
In model L2, we set the coefficient of the thermal diffusivity ac = 0.2 so that it is unstable to the MTI. In this model, the magnetic field is amplified only by the MTI. In models H1 and H2, the centrifugal barrier is outside our inner boundary. The time-scale for the growth of the MRI is much shorter than the gas infall time, so the MRI will affect the flow in both models. In model H1, we set the coefficient of the thermal diffusivity ac = 0, so that the MTI is suppressed and the magnetic field is amplified only by the MRI. In model H2, we set the coefficient of the thermal diffusivity ac = 0.2, so that both MTI and MRI coexist, and the magnetic field is amplified by the non-linear evolution of both. The properties of the four models are summarized in Table 1. The models demonstrate the interplay between the MTI and MRI. We have also tried various other values of ac; we have found that changing ac by a factor of a few does not affect our results, consistent with the conclusion in SQS08.
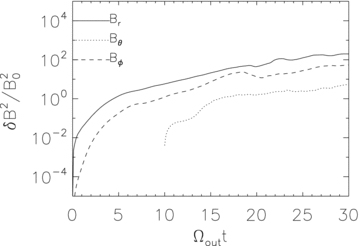
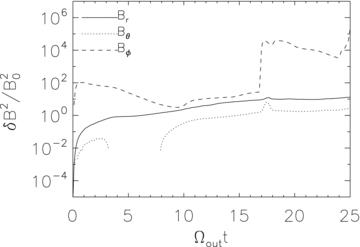
Figs 1–4 show the change of magnetic energy as a function of time in these four models. The energy is averaged from r=rout/40 to rout. The solid, dotted and dashed lines correspond to the energy in the r, θ and ϕ components of the magnetic field, respectively.
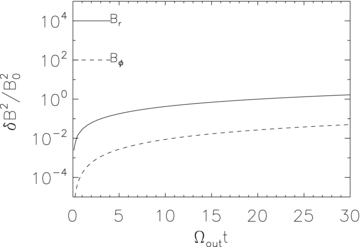
Evolution of the volume-averaged magnetic energy in both the r and ϕ components of the magnetic field normalized to the initial magnetic energy in a shell from rout/40 to rout in model L1. In this model, the magnetic field is amplified only by flux freezing. As vθ∼ 0, there is almost no amplification of the θ component of the field, so it is not shown. The growth of each component is defined as δB2r,θ,ϕ = (〈B2r,θ,ϕ〉V−B2r,θ,ϕ,0), where 〈〉V denotes volume average and B0 is the initial field strength.
Change of volume-averaged magnetic energy in the r, θ and ϕ components of the magnetic field normalized to the initial magnetic energy in a shell from rout/40 to rout as a function of time in model L2. In this model, the magnetic field is amplified by the MTI. The growth of each component of the magnetic field is defined as δB2r,θ,ϕ = (〈B2r,θ,ϕ〉V−B2r,θ,ϕ,0), where 〈〉V denotes volume average and B0 is the initial field strength.
Change of volume-averaged magnetic energy in the r, θ and ϕ components of the magnetic field normalized to the initial magnetic energy in a shell from rout/40 to rout as a function of time in model H1. In this model, the magnetic field is amplified by the MRI. The growth of each component of the magnetic field is defined as δB2r,θ,ϕ = (〈B2r,θ,ϕ〉V−B2r,θ,ϕ,0), where 〈〉V denotes volume average and B0 is the initial field strength.
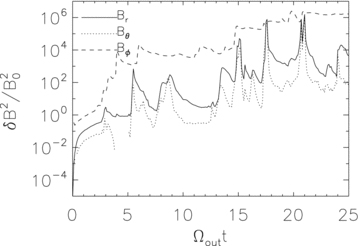
Change of volume-averaged magnetic energy in the r, θ and ϕ components of the magnetic field normalized to the initial magnetic energy in a shell from rout/40 to rout as a function of time in model H2. In this model, the magnetic field is amplified by both the MTI and MRI. The growth of each component of the magnetic field is defined as δB2r,θ,ϕ = (〈B2r,θ,ϕ〉V−B2r,θ,ϕ,0), where 〈〉V denotes volume average and B0 is the initial field strength.
Fig. 1 shows the magnetic energy evolution in model L1. The field is smoothly amplified by flux freezing. At the end of the simulation, the field is only amplified by a factor of 2. Because vθ∼ 0, there is almost no amplification of the θ component of the field. From this model, we can see that the effect of flux freezing on magnetic field amplification is very small.

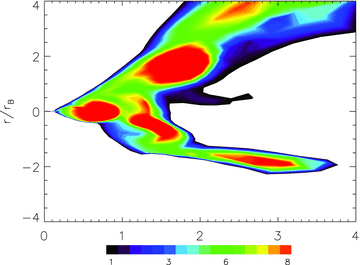
Contour of Re=λMRI/Δx at time t = 16.5, where Δx is the grid size. It is clear that the wavelength of the fastest growing mode of the MRI is well resolved at time t = 16.5.




3.2 Role of MTI in angular momentum transfer
The MRI is now believed to be the most promising mechanism of angular momentum transport in fully ionized accretion flows. It is interesting to investigate whether the MTI can contribute to angular momentum transfer in hot, diffuse accretion flows.
First, we compare the angular momentum profiles in models L1 and L2 at the end of both calculations. The flow in model L1 is laminar, while there is (only) MTI in model L2. The angular momentum profiles at the end of the simulations are shown in Fig. 6. It is clear that the angular momentum distribution of model L1 is almost the same as the initial distribution. This is because the flow in model L1 is laminar, and the magnetic field is very weak. Therefore, both the Reynolds and magnetic stresses are very small and there is almost no angular momentum transfer. It is also clear that in model L2, angular momentum is transferred from the inner to the outer regions. In order to investigate the mechanism for the angular momentum transport in this case, we plot the Maxwell and Reynolds stresses in Fig. 7. The dotted and solid lines correspond to the Maxwell stress (−BrBϕ/4π) in models L1 and L2, respectively. Because of magnetic field amplification by the MTI, the Maxwell stress in model L2 is much larger than that in model L1. The triangles and squares denote the Reynolds stress in models L1 and L2, respectively. Because of the presence of motions driven by the MTI in model L2, the Reynolds stress is three orders of magnitude higher than in model L1. Because the magnetic field is still very weak in model L2, the Maxwell stress is much smaller than the Reynolds stress. We conclude that the angular momentum transport in model L2 is dominated by the Reynolds stress. We note that although the MTI induced Reynolds stress does transfer angular momentum, the effect is quite low, so that there is only a small change of the angular momentum profile compared to the initial conditions.

Radial profiles of specific angular momentum for models L1 (dotted line) and L2 (solid line). The dashed line shows the initial angular momentum distribution.
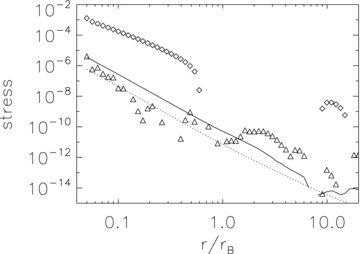
Radial profiles of stress. The dotted and solid lines correspond to the Maxwell stress in models L1 and L2, respectively. The triangles and squares are Reynolds stress in models L1 and L2, respectively.
Next, in Fig. 8, we compare the angular momentum distribution in models H1 and H2 at late times. Both profiles are similar. Recall that both models are unstable to the MRI, while only H2 is unstable to the MTI. The similarity in the angular momentum profiles indicates that the role of the MTI in angular momentum transport is less important compared to the MRI.
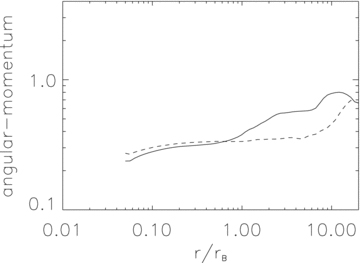
Radial profiles of specific angular momentum for models H1 (solid line) and H2 (dashed line).
3.3 Effects of MTI on the structure of the accretion flow
Fig. 9 shows the time-averaged density (upper-left panel), temperature (upper-right) and mass accretion rate (lower panel) for models H1 and H2. In the upper panels, the solid and dashed lines correspond to models H1 and H2, respectively. In the lower panel, the solid, dotted and dashed lines correspond to the net accretion rate, inflow rate and outflow rate, respectively. The black and red lines correspond to models H1 and H2, respectively. As shown in the upper-right panel, the radial profile of temperature in model H2 (with MTI) is flatter than that in model H1. This is likely because thermal conduction transports energy from the inner to the outer regions of the flow. From the lower panel, we can see that the inflow rate decreases because of the effects of thermal conduction. This is consistent with Johnson & Quataert (2007). The decrease is caused by the increased heating of the outer regions by thermal conduction.
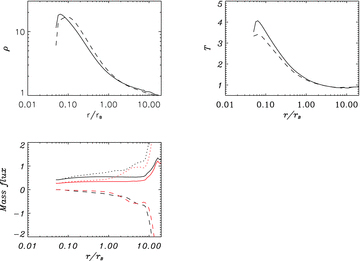
Radial profiles of time-averaged variables in models H1 and H2: density (upper-left panel) and temperature (upper-right panel). The lower panel shows the mass accretion rate. In the upper panels, solid and dashed lines correspond to models H1 and H2, respectively. In the lower panel, the solid, dotted and dashed lines correspond to the net accretion rate, inflow rate and outflow rate, respectively. The black and red lines correspond to models H1 and H2, respectively.
4 DISCUSSION AND SUMMARY
In extremely low accretion rate systems, the plasma is very dilute, and the collisional mean-free path of electrons is much greater than their Larmor radius. Thus, thermal conduction is anisotropic and along magnetic field lines. Anisotropic thermal conduction can fundamentally alter the Schwarzschild convective instability criterion. Convection sets in when temperature (as opposed to entropy) increases in the direction of gravity. Convective instability in this regime is referred to as the MTI. The MTI can amplify the magnetic field and align field lines with the temperature gradient (i.e. the radial direction). If the flow has angular momentum, the MRI may also exist. We have investigated the possible interaction between the MTI and MRI by performing two-dimensional MHD simulations of non-radiative rotating accretion flows with anisotropic thermal conduction.
We have presented the results from four models, with the focus on the amplification of magnetic energy by the combination of MTI and MRI. As a control case, we computed a model (L1) in which neither the MTI nor the MRI was present, so that the magnetic field is amplified only by flux freezing and geometrical compression in the flow. We find that field amplification via flux freezing in this case is very small. Next, we investigated the effects of the MTI on magnetic field amplification in model L2. We find that the MTI can amplify magnetic field significantly, which is consistent with the result obtained in previous work. Finally, we considered the evolution of rotating flows that are unstable to the MRI. In model H1 (no thermal conduction), only the MRI is present. In model H2, both the MTI and MRI coexist. By comparing the structure and evolution of these different models, we find that if the MTI alone can amplify the magnetic energy by a factor of Ft, and the MRI alone by a factor of Fr, then when the MTI and MRI are both present, the magnetic energy can be amplified by a factor of FtFr. Thus, we conclude that the MTI and MRI operate independently, and that there is little feedback on the amplification factor in the non-linear regime. Because the MTI and MRI are driven by different properties of the flow (temperature gradient for MTI and angular velocity gradient for MRI), the presence of one may not strongly affect the presence of the others. Thus, anisotropic thermal conduction can make the plasma buoyantly unstable, regardless of whether or not turbulent eddies driven by the MRI are present. Similarly, an unstable rotation profile can result in the MRI, regardless of whether or not there are convective eddies induced by the MTI.
In addition to the interplay between the MTI and MRI, we have also investigated the effects of MTI on angular momentum transport. We find that the MTI enhances angular momentum transport simply because it can amplify magnetic field (thus enhancing the Maxwell stress) and induce radial motions (thus enhancing the Reynolds stress). However, we note that the effects of the MTI on angular momentum transfer are small. Finally, we find that thermal conduction does make the slope of the temperature smaller because of the outward transport of energy, and the increase of the temperature in the outer regions decreases the mass accretion rate.
Lastly, we would like to mention that in a weakly collisional accretion flow, the ion mean-free path can be much greater than its Larmor radius, and thus the pressure tensor is anisotropic. In this case, the growth rate of the MRI can increase dramatically at small wavenumbers compared to the MRI in ideal MHD (Quataert, Dorland & Hammett 2002; Sharma, Hammett & Quataert 2003). In this regime, the viscous stress tensor is anisotropic, and Balbus (2004) has shown that when anisotropic viscosity is included, the flow is subject to the magnetoviscous instability (MVI); see also Islam & Balbus (2005). The MVI may also amplify the magnetic field significantly. An interesting project for the future is to investigate the effects of the MVI on hot accretion flows.
We thank P. Sharma for sending us his code. This work was supported in part by the Natural Science Foundation of China (grants 10773024, 10833002, 10821302 and 10825314), the National Basic Research Programme of China (973 Programme 2009CB824800) and the CAS/SAFEA International Partnership Programme for Creative Research Teams.
REFERENCES

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}