






SUMMARY
In this paper, we derive analytical expressions for the dislocation Love numbers (DLNs) for a layered, spherical, transversely isotropic and self-gravitating Earth. This solution is based on the spherical system of vector functions (or the vector spherical harmonics) and a new propagating matrix method called the dual variable and position method. The DLNs can be obtained with high accuracy to an arbitrarily high degree, thereby allowing a wide range of applications based on high resolution earth models. Compared to the traditional numerical integration approach, the present analytical solution is at least 3 orders of magnitude faster. Our calculation also indicates that, compared to the isotropic PREM model, the effect of anisotropy is small, with a relative error about 5 per cent for DLN h12 at degree n = 69 with source located at depth 100 km. We provide MATLAB code for computing the analytical DLNs in the supplementary materials section, along with a user manual.
1 INTRODUCTION
Seismicity is an important geodynamic phenomenon. Earthquakes can cause great social and economic damage, but they also provide insights into plate motion, intraplate deformation, the mechanical structure of the earth and the behaviour of active fault systems. Earthquakes deform the Earth, producing redistributions of mass, stress and strain and causing measurable surface displacements as well as changes in the external gravity field.
Simulation of coseismic deformation was pioneered by Steketee (1958) who applied the theory of dislocations developed in solid-state physics to explain the strength of crystalline materials. This work was expanded by many geophysicists who examined numerous special classes of dislocation and fault movement, including vertical strike-slip faults, pure dip-slip faults and dislocations in Poisson solids. After a careful summary of previous work (e.g. Steketee 1958; Berry & Sales 1962; Maruyama 1964; Press 1965; Yamazaki 1978; Davis 1983), Okada (1985, 1992) presented a complete suite of closed analytical expressions for both surface and internal displacements, strains and tilts due to inclined shear and tensile faults in a homogeneous isotropic half-space. Both point dislocations and finite rectangular dislocations were considered. This analytical solution was extended to the finite triangular dislocation case by Meade (2007), and more recently by Nikkhoo & Walter (2015) where any possible pseudo singularity was completely removed. Okubo (1991) and Okubo (1992) examined analytically the potential and acceleration changes caused by point dislocations and by finite planar faults embedded in a homogeneous half-space. Analytical solutions were also derived for finite dislocations of polygonal shape in a transversely isotropic half-space (Pan et al.2014) and in a general anisotropic half-space (Pan et al.2015a).
The Earth is not homogeneous, and its material compositions and physical properties tend to change most rapidly in the vertical direction. Accordingly, layered half-space models are considerably more realistic than homogeneous half-space models. The elastic response to a dislocation embedded in a layered half-space is usually formulated using integral transforms, both for point dislocations (e.g. Singh 1970; Pan 1989) and finite dislocations (e.g. Fukahata & Matsu'ura 2005; Wang et al.2006).
The Earth is not flat, but approximately spherical in shape, so even a layered half-space solution is valid only in the near-field of an earthquake, say within ∼100 km. A more realistic earth model has to be spherical, layered and self-gravitating. Sun (1992) extended the dislocation theory from layered half-space to the layered spherical Earth and showed that the curvature effect is significant, especially for far-field results (Sun & Okubo 2002). This implies the necessity of using a spherical Earth. There exist some dislocation formulations and codes which incorporate layering and sphericity but ignore the impact of gravity (Pollitz 1992). This can also lead to significant prediction errors since the coupling between strain energy and gravitational potential energy needs to be considered (Gomez et al.2017). Invoking the dislocation problem in a layered spherical Earth with gravity significantly complicates its solution. For the special case of a homogeneous and elasto-gravitational sphere, an analytical solution exists (Love 1911; Gilbert & Backus 1968). Furthermore Love (1911) solved the force loading problem, which can be applied to find the corresponding dislocation solution by making use of Betti's reciprocity relation between the force solution and the dislocation solution (Pan 1991; Pan & Chen 2015). This reciprocity relation was further applied by Okubo (1993) to derive the relations between spherical coefficients in the surface-loading solution and the internal-dislocation solution. The reciprocity relation for the coefficients has been used to calculate coseismic displacement, geoid and strain changes (Sun 2003, 2004a, 2004b; Tang & Sun 2017), the deformation field due to surface rupture (Sun & Dong 2013), and more recently to simulate viscoelastic relaxation (Tang & Sun 2018).
We point out that besides the analytical solutions for a spherical Earth by Love (1911) and Gilbert & Backus (1968), various other analytical solutions have been derived and applied to problems in Earth science. Under the assumption of incompressibility, earth deformation by surface loading and by earthquakes were analytically solved, respectively, by Wu & Peltier (1982) for homogeneous sphere and Sabadini & Vermeersen (1997) for a layered sphere. Other analytical advances can be found in the recent monograph by Sabadini et al. (2016). On the other hand, for more realistic layered and spherical earth models, numerical methods, such as the Runge–Kutta integration, are normally utilized. This numerical method can be computationally expensive, even with the use of the reciprocity relation of Okubo (1993), when simulating the post-seismic transient deformation driven by viscoelastic relaxation (Wang 1999; Tanaka et al.2006).
Pan et al. (2015b) derived the analytical loading Love numbers for a spherically symmetric non-rotating, elastic and transversely isotropic (SNRETI) Earth. This is achieved by assuming that the density is constant and gravity varies linearly with radius in any layer within the Earth's core, while density is inversely proportional to radius and gravity is constant in any layer within the Earth's mantle. The isotropic (ISO) and transversely isotropic (TI) PREM models of Pan et al. (2015b) nearly overlap with the real earth PREM (Dziewonski & Anderson 1981). For instance, with only 56 mantle layers and 26 core layers, the difference of the material properties (including density and gravity) between the real PREM model and the ISO and TI PREM is less than l per cent in the entire core and less than 0.6 per cent in the entire mantle. Furthermore, one can easily further increase the accuracy in the discretized model by adding more layers. Chen et al. (2018) used this analytical solution and applied the stiffness matrix method to stably compute load Love numbers to an arbitrarily high degree. However, this analytical method has not been applied to the problem of internal dislocations. This motivates the present study.
Simulations of co- and post-seismic deformation are important to our understanding of Earth's mechanical properties, structure and behaviour. For instance, solutions obtained can be used to interpret ground- and space-based observations (Imanishi et al.2004; Sun & Okubo 2004; Heki & Matsuo 2010); to study earthquake-induced changes in Earth's rotation and polar motion (Chao & Gross 1987; Gross & Chao 2006; Zhou et al.2013, 2014; Cambiotti et al.2016), changes in its gravity field (Han et al.2006), and changes in reference frames (Zhou et al.2015, 2016), sea level variation (Melini et al.2010), as well as changes in Earth's volume (Xu & Sun 2014) and gravitational potential energy (Xu & Chao 2017; Zhou et al.2017). Therefore, an analytical solution for the dislocation Love numbers (DLNs) would greatly reduce the computational cost involved in calculating the DLNs and the associated Green's functions, for any given earth model. This desire also motivates the present study.
In this paper (Paper 1) we derive, for the first time, the analytical solutions for the DLNs within a layered, spherical and self-gravitating Earth. Some rocks exhibit transverse isotropy and the effect of this special and relatively simple class of anisotropy is sometimes significant (Pan et al.2014; Lynner et al.2018). Furthermore, the effective anisotropy could exist due to imbalanced tectonic stress and strain fields (Cambiotti et al.2014), and viscoelastic anisotropy could be large in mantle materials (Hansen et al.2012). As such, we further allow for the possibility of transverse isotropy in our earth model, though the user needs not to invoke it. We recognize that invoking transverse isotropy typically makes only minor changes to deformation solutions. However since it is relatively easy to incorporate transverse isotropy into the earth model, we do so to allow the user the freedom to invoke it whenever necessary.
We consider an internal point dislocation within the SNRETI Earth, which is also called a concentrated or infinitesimal dislocation, where the dislocation has a unit area, a given surface-normal direction and a 3-D Burgers’ vector. This paper is organized as follows: we first briefly describe the theory on how to analytically compute elastic DLNs in Section 2. Section 3 presents the source function expressions of a point dislocation by making use of the equivalent body-force method. Section 4 defines the DLNs for the four fundamental dislocations and the corresponding expressions of the Green's functions (to be used in Paper 2). Section 5 derives the Green's functions of an arbitrary dislocation from the results for the four fundamental dislocations. Section 6 verifies the accuracy and efficiency of our approach for calculating the DLNs. Conclusions are drawn in Section 7. Additionally, Appendix A presents the spherical system of vector functions or vector spherical harmonics. Appendix B discusses the specific cases of degrees n = 0 and 1. Appendix C lists the source functions of the four fundamental types of point dislocations, for both a TI and and ISO Earth. Appendix D provides the Green's function expressions for the displacements, gravity and geoid changes, as well as gravity disturbance at a given field point, induced by an arbitrary point dislocation.
2 THEORETICAL BASIS OF THE ANALYTICAL SOLUTIONS
The dislocation problem differs from the surface load problem in two ways: (1) there are discontinuities across or equivalent body forces at the source level, and hence there are inhomogeneous Dirac functions on the right-hand side of eqs (3) and (4), and (2) the boundary conditions are ‘traction’ free on the Earth's surface. Takeuchi & Saito (1972) showed that it was not necessary to directly solve the inhomogeneous differential equations, but instead, to solve twice the homogeneous differential equations. First, three general solutions with three unknown coefficients are obtained by setting three independent initial values in the Earth's centre. Then a particular solution is derived by integrating from the source to the Earth's surface with initial values being the given discontinuities of the source. Finally, the sum of the general and particular solutions must satisfy the traction-free boundary conditions on the surface, which determines the three unknown coefficients. In this paper, however, we introduce a novel and more efficient approach.
Although the solution on the Earth's surface can be analytically obtained by the propagator matrix method (e.g. Pan et al.2015b), numerical difficulties are introduced by round-off and propagating errors. The direct propagator matrix method in Pan et al. (2015b) was unable to provide correct results for higher harmonic degrees, say n > 6000. To overcome this problem, Chen et al. (2018) applied the stiffness matrix method to obtain stable results for arbitrary harmonic degree. In this paper, we employ yet another new method, called dual variable and position (DVP) method (e.g. Liu et al.2018), to propagate the solution from the Earth's centre to the surface. This method was developed and advanced from the well-known precise integration technique (e.g. Zhong et al.2004; Ai & Cheng 2014), and it has been shown to be very accurate and extremely powerful (e.g. Pan et al.2018). The main relations of the DVP method are described below, using the spheroidal case as an example.
We emphasize that since the real parts of vector s1 are all positive and those of s2 are all negative, only exponentials with negative real parts are involved in eq. (11), which guarantees the computation stability. We further point out that the layer matrix (10) introduced in this paper is different from both the traditional propagator matrix (Pan et al.2015b) and the stiffness matrix (Chen et al.2018). It is this special ordering which makes the DVP method unique.
eq. (13) is the important recursive relation in the DVP method. It relates the solutions in adjacent layers. Therefore, making use of eq. (13) repeatedly, we can propagate the solution from one layer to any other layer.
Unlike Pan et al. (2015b), where the entire core was assumed liquid, we assume more realistically here that there is a homogeneous inner solid core in the Earth. Therefore, three regular solutions at the interface of the inner solid core can be directly obtained according to Love (1911). They are represented by the spherical Bessel functions of first kind and power functions (Takeuchi & Saito 1972). These three solutions can then be connected to the lower interface of the (outer) liquid core so that they can be propagated to the core–mantle boundary. It is worth pointing out that our numerical results show that the inner solid core has only a very slight effect on the DLNs.
Our propagating method, that is from the core–mantle boundary to the source level, and then from the source level to Earth's surface, is different from that of Takeuchi & Saito (1972) wherein the solution is propagated from core–mantle boundary to Earth's surface, and then from the source to Earth's surface. Numerical results show that our method results in the DLNs almost identical to those computed using the approach of Takeuchi & Saito (1972). Since our method requires less matrix propagation, that is propagating from the core–mantle boundary to source versus from the core–mantle boundary to Earth's surface, and furthermore it is analytical, it is more stable and computationally more efficient, particularly when n is large.
In so doing, all the variables now have the same order of n, which makes the computation more stable when n is very large.
It is noted that matrix [P] is the inverse of matrix [S] and that the source functions should be correspondingly changed according to eq. (21). Similar relations can be obtained for the corresponding toroidal deformation (by simply replacing any matrix or vector of dimension 3 in the spheroidal deformation by dimension 1 in the toroidal deformation).
3 SOURCE FUNCTIONS OF POINT DISLOCATIONS
It is noted that summation is implied for repeated indices in eq. (24).
The final discontinuities are listed in Appendix C for easy reference.
4 DLNS AND GREEN'S FUNCTIONS
With the solutions of the coefficients UL, UM and Φ on the Earth's surface, we can derive the DLNs. To simplify the computation, we remove the common factors which depend on the harmonic degree n and source depth rs in eq. (C1) in Appendix C. These factors will be recovered in computing the Green's functions. The imaginary unit i is also processed similarly. In what follows, we define the DLNs and derive the corresponding Green's functions of the spheroidal and toroidal displacements (at a given radius r in the mantle) for the four fundamental dislocations (Ben-Menahem & Singh 1981; Sun & Okubo 1993).
The Burgers vector associated with a dislocation characterizes the relative motion of two points on opposite sides of the dislocation surface when the distance between these points is infinitesimally small. Let the Burger's vector be v and the normal to the dislocation surface be n. There are two unit normals for any flat surface: they have opposite signs and point in opposite directions. We choose n so that it defines (by pointing towards) the ‘positive’ side of the dislocation, allowing us to establish a sign convention for the Burgers vector v. We define v = (u+ − u−), where u+ and u− are the displacement vectors on the positive and negative sides of the dislocation, respectively. We decompose both vectors, v and n, in a local, right-handed, Cartesian coordinate system with its origin at the centre of the dislocation, and its 1, 2 and 3 axes are the unit vectors eθ, eφ and er, respectively (Fig. 1). This axis system is also referred to as the SEU axis system since its axes point south, east and up. The Burger's vector v has components (v1,v2,v3) or equivalently (vs,ve,vu), and the normal vector has components (n1,n2,n3) or equivalently (ns,ne,nu). For an isotropic or transversely isotropic medium, it is possible to characterize a dislocation with any orientation and any Burgers vector as a linear combination of four elementary dislocations (Sun & Okubo 1993) in which the normal vector and the Burgers vector are both unit vectors aligned with the 1, 2 or 3 axes [e.g. see Ben-Menahem & Singh (1981) for a review of this and surrounding concepts].
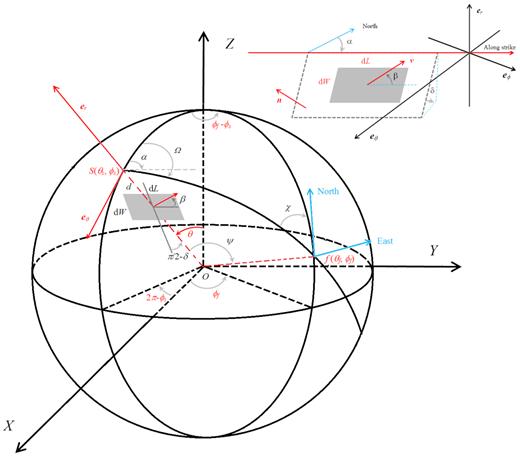
Geometric relations in spherical coordinates among both global and local orientation angles and distances. The source coordinate of the fault is at (rs,θs,ϕs) and its epicentre is at s(a,θs,ϕs). The observation point or the field point is located on the surface at f(a,θf,ϕ f). East is along eϕ, South along eθ, up along er. The zoom-in fault parameters are: depth d = a − rs, strike α, dip δ, slip β, length dL, width dW, slip vector ν, and fault normal n.
Following Sun & Okubo (1993) we specify the standard dislocation modes with a double index i j in which i refers to the direction of the unit Burgers vector and j refers to the direction of the unit normal vector. Thus the ‘12″ mode means v = (1,0,0) and n = (0,1,0), so the fault normal points east, (i.e. it is a vertical fault that strikes north), and the unit Burger's vector points south, meaning that this is a vertical, right-lateral, strike-slip fault. This is one of the four standard modes of dislocation. Two of them are shear dislocations and the other two are tensile (i.e. dilatational or opening-mode) dislocations, as summarized in Table 1.
The four standard dislocations: their unit Burgers vectors and unit normal vectors.
| Burgers (v1,v2,v3) | Normal (n1,n2,n3) | ||
|---|---|---|---|
| Mode index | (s, e, u) | (s, e, u) | Geological description: H = horizontal, V = vertical, SS = strike-slip, DS = dip-slip, T = tensile, RL = right lateral |
| 12 | (1,0,0) | (0,1,0) | V RL SS fault, strikes north, east wall moves south |
| 32 | (0,0,1) | (0,1,0) | V DS fault, strikes north, east wall moves up |
| 22 | (0,1,0) | (0,1,0) | V T fault, strikes north, east wall moves east (opening) |
| 33 | (0,0,1) | (0,0,1) | H T fault, upper wall moves up (opening) |
| Burgers (v1,v2,v3) | Normal (n1,n2,n3) | ||
|---|---|---|---|
| Mode index | (s, e, u) | (s, e, u) | Geological description: H = horizontal, V = vertical, SS = strike-slip, DS = dip-slip, T = tensile, RL = right lateral |
| 12 | (1,0,0) | (0,1,0) | V RL SS fault, strikes north, east wall moves south |
| 32 | (0,0,1) | (0,1,0) | V DS fault, strikes north, east wall moves up |
| 22 | (0,1,0) | (0,1,0) | V T fault, strikes north, east wall moves east (opening) |
| 33 | (0,0,1) | (0,0,1) | H T fault, upper wall moves up (opening) |
The four standard dislocations: their unit Burgers vectors and unit normal vectors.
| Burgers (v1,v2,v3) | Normal (n1,n2,n3) | ||
|---|---|---|---|
| Mode index | (s, e, u) | (s, e, u) | Geological description: H = horizontal, V = vertical, SS = strike-slip, DS = dip-slip, T = tensile, RL = right lateral |
| 12 | (1,0,0) | (0,1,0) | V RL SS fault, strikes north, east wall moves south |
| 32 | (0,0,1) | (0,1,0) | V DS fault, strikes north, east wall moves up |
| 22 | (0,1,0) | (0,1,0) | V T fault, strikes north, east wall moves east (opening) |
| 33 | (0,0,1) | (0,0,1) | H T fault, upper wall moves up (opening) |
| Burgers (v1,v2,v3) | Normal (n1,n2,n3) | ||
|---|---|---|---|
| Mode index | (s, e, u) | (s, e, u) | Geological description: H = horizontal, V = vertical, SS = strike-slip, DS = dip-slip, T = tensile, RL = right lateral |
| 12 | (1,0,0) | (0,1,0) | V RL SS fault, strikes north, east wall moves south |
| 32 | (0,0,1) | (0,1,0) | V DS fault, strikes north, east wall moves up |
| 22 | (0,1,0) | (0,1,0) | V T fault, strikes north, east wall moves east (opening) |
| 33 | (0,0,1) | (0,0,1) | H T fault, upper wall moves up (opening) |
4.1 Vertical strike-slip (v1 = 1, n2 = 1) for m = ± 2 (denoted with superscript "12")
Therefore the Green's functions of the spheroidal and toroidal displacements are as follows.
4.2 Vertical dip-slip (v3 = 1, n2 = 1) for m = ± 1 (denoted with superscript "32")
4.3 Horizontal tensile fracture (v2 = 1, n2 = 1) for m = 0 and m = ± 2 (denoted with superscript "22")
This type of dislocation is special because both m = 0 and m = ± 2 contribute to the source functions, and needs to be discussed separately.
It is found that the displacements due to this kind of dislocation are the same as those of a vertical strike-slip except for an opposite sign and different dependences on longitude (ϕ). Therefore the Green's functions defined are identical to those of the vertical strike-slip, as in eqs (33) and eq. (35).
4.4 Vertical tensile fracture (v3 = 1, n3 = 1), m = 0 (denoted with superscript "33")
5 GREEN'S FUNCTIONS DUE TO AN ARBITRARY POINT DISLOCATION
Below, we discuss both the shear-mode and tensile-mode separately.
Other quantities, such as the spheroidal and toroidal horizontal displacements, have similar expressions as eq. (60), which are derived and listed in Appendix D for easy reference.
Other components can be easily derived by following the similar procedure as for the shear-mode induced fields.
6 DLN RESULTS AND DISCUSSION
We use two variants of the earth model PREM (Dziewonski & Anderson 1981) to generate isotropic (ISO PREM) and transversely isotropic (TI PREM) earth models which are slightly modified within each layer so as to conform with the two assumptions (for the core and mantle) discussed in Section 2. The inner solid core is assumed to be homogeneous and its parameters are the averaged ones of those listed in PREM model (with radius rsc = 1221.5 km, ρ = 12 980.1 kg m–3, λ = 1.2848 × 1012 Pa, μ = 1.6953 × 1011 Pa). The outer liquid core is layered and compressible. The ocean layer is replaced by the crust layer beneath it. Except for the inner solid core, all the other model parameters can be found in Pan et al. (2015b). We further point out that these two earth models (ISO PREM and TI PREM) are very close to the original isotropic and transversely isotropic earth models in Dziewonski & Anderson (1981) in terms of both curves and digital data as discussed and compared by Pan et al. (2015b).
6.1 Comparison with direct numerical integration
The DLNs are computed by the analytical DVP method proposed in this paper and are compared with those obtained by direct numerical integration. Note that the DLN results are based on the definitions in Section 4 with dimensions, unless specified otherwise. In the latter method, the reciprocity theorem proposed by Okubo (1993) is applied and the numerical integration is carried out by the Runge–Kutta technique. More specifically, the thickness of the layer (mantle and core) is the integral step of the Runge–Kutta technique. In each step, the model is homogeneous. Therefore the thickness, that is step size, of the layer is a crucial parameter in this method. A large thickness would seriously destroy the homogeneity approximation, thus producing inaccurate results. On the other hand, invoking many thinner layers would greatly increase the total computation time, and may also accumulate large levels of numerical noise.
We first produce several alternatively discretized models (i.e. with different step sizes), all based on the original ISO PREM model, and compute the DLNs for each variant. The discretization features of these variants are listed in Table 2.
Discretization of earth model via Runge–Kutta technique (step number is actually the thickness of each discrete layer).
| Step size (m) | 50 | 100 | 200 | 500 | 1000 | 2000 | 5000 |
|---|---|---|---|---|---|---|---|
| Number of layers | 127 400 | 63 700 | 31 851 | 12 741 | 6370 | 3186 | 1275 |
| Step size (m) | 50 | 100 | 200 | 500 | 1000 | 2000 | 5000 |
|---|---|---|---|---|---|---|---|
| Number of layers | 127 400 | 63 700 | 31 851 | 12 741 | 6370 | 3186 | 1275 |
Discretization of earth model via Runge–Kutta technique (step number is actually the thickness of each discrete layer).
| Step size (m) | 50 | 100 | 200 | 500 | 1000 | 2000 | 5000 |
|---|---|---|---|---|---|---|---|
| Number of layers | 127 400 | 63 700 | 31 851 | 12 741 | 6370 | 3186 | 1275 |
| Step size (m) | 50 | 100 | 200 | 500 | 1000 | 2000 | 5000 |
|---|---|---|---|---|---|---|---|
| Number of layers | 127 400 | 63 700 | 31 851 | 12 741 | 6370 | 3186 | 1275 |
The DLNs for a source at depth d = 20 km, computed using different numerical integration steps (corresponding to different discretizations of the Earth), are depicted in Fig. 2, and are compared with those from the analytical DVP method. The results obtained with a step size of 50 m are nearly identical to those with a step size of 100 m, so they are not shown in Fig. 2. To clearly show the differences between the curves, the factor (rs/a)n is excluded from the values of DLNs for this particular case.
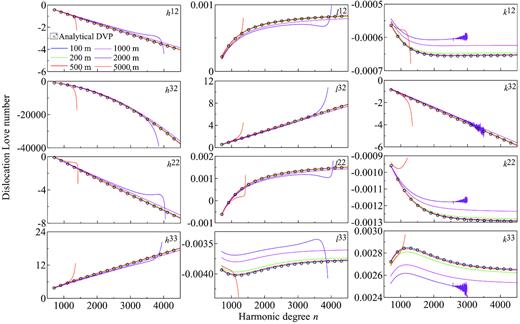
DLNs, with factor (rs/a)n being excluded, due to different types of dislocation source located at depth d ( = a − rs) = 20 km, computed by the analytical DVP method, as compared to the numerical Runge–Kutta technique with different integral steps (i.e. the thickness in each step). The earth model is ISO PREM.
It is observed from Fig. 2 that the numerical DLNs with step size of 5 km are completely wrong when degree n is larger than about 1000. When the step size is 2 km, some DLNs are also wrong. For example, DLN h’s are obviously incorrect when degree n is larger than 3000, and DLN k’s begin to oscillate when n is about 2500. Although stable results can be obtained by the numerical integration when the step size is 1 km, one could still observe some relatively large differences as compared to those using the step size of 100 m. However, when the step size is set to 500 m or smaller (i.e. at 100, 200 and 500 m), the numerically calculated DNLs are closer to the analytical ones. Consequently, for a source depth of 20 km, the step size for the numerical integral method should be 500 m or smaller.
The DNLs computed by our analytical DVP method are also plotted in Fig. 2, which are consistent with the numerical ones using step sizes of 100 and 200 m. This validates the new analytical DVP method introduced in this paper. It should be noted that the original ISO PREM model consisted of less than 100 uniform layers (mantle plus core, with the largest layer thickness being 100 km) which is very small compared to the number of layers used in the numerical integration method (Table 2). As such, the proposed analytical DVP method is much faster than the direct numerical integration approach—at least 3 orders of magnitude faster!
To clearly demonstrate the excellent agreement of the DLNs computed by the analytical and numerical methods, Fig. 3 shows only the DLNs results by the numerical integral method using the step size of 50 m and those from the analytical DVP method, also for a source at depth of 20 km, but with the factor (rs/a)n being included (i.e. the same as originally defined in Section 4). To show the results of degree zero for the tensile dislocation in logarithmic axis, n = 0 is shifted to n = 0.8. Again, the excellent agreement between the two methods can be clearly observed.
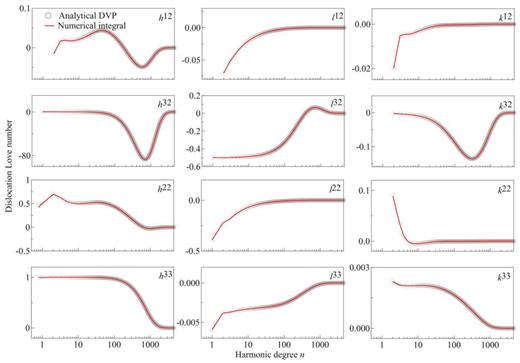
DLNs due to different types of dislocation source located at depth d = a − rs = 20 km, computed by the analytical DVP method, as compared to the numerical Runge–Kutta technique with the step size of 50 m (i.e. with thickness of 50 m for each layer). The earth model is ISO PREM.
6.2 Convergence and surface rupture
Convergence is a key issue when computing Green's functions for a layered Earth. In theory, the summation for the harmonic degree n in the Green's function goes to infinity. However, this is unnecessary because the DNLs tend to zero with increasing degree n, providing that the source depth is greater than zero. Therefore, all the summations involved in the Green's function expression in Section 4 can be always truncated to a relatively large harmonic degree as long as the Green's functions are convergent. Sun & Okubo (1993) provided a very useful criterion: to guarantee an accuracy of about 10−5 for the Green's function solution, the largest degree n needed is nMax = 10a/d, where d is the source depth and a is the Earth's radius.
To examine the criterion introduced by Sun & Okubo (1993) and to check the capability of our DVP method, we plot in Fig. 4 the source depth versus the converged degrees of the DLNs using the ISO PREM model (using DLN h12 as example). The lower-degree parts are not presented in order to show clearly the convergence behaviour. It is obvious from Fig. 4 that all the non-zero DLNs at different depths converge to zero when harmonic degree n approaches infinity because of the factor (rs/a)n. The inclined solid straight line shows the truncation criterion of Sun & Okubo (1993). Comparing the circles with the inclined line in Fig. 4, it is clear that our DVP method can calculate all the DLNs all the way to a very large degree n which can be much larger than nMax. For instance, for the surface rupture or near surface dislocation, our DVP method can provide DLNs all the way to degree n larger than 1 million! This will guarantee the DLN accuracy by our method to better, say, than 10−6. Hence the computed DLNs by our method are sufficient to derive the Green's functions with an accuracy of at least 10−5.
![Relationship between source depth d = a − rs (in km) and converged harmonic degree n of the DLNs [circles show DLNs; horizontal dash lines are zero lines of the DLNs at different source depths; inclined solid straight line shows the truncation criterion nMax = 10a/d from Sun & Okubo (1993)]. The DLN element h12 is used to show the convergent trend.](https://oup.silverchair-cdn.com/oup/backfile/Content_public/Journal/gji/217/3/10.1093_gji_ggz110/1/m_ggz110fig4.jpeg?Expires=1749885148&Signature=N8mYK9yFPUq061tzY5WfzFsFUjhZIhuakPeq4Hkm1-iCpQVrUi8Xx0rGmy95KKP7z1uJYYY2barPaLja8jQJkXNn2VF90ewP4zMGmznlDWVwi~90Qlnc~MO52hJFkgCK6A8RCcLIhDvRpT04InhwQwMRPxIvFWShGhd-Q0LC5xOm1EeyMjY1yH3J9Py7L1glytRU80yYjB3uyIlzF1P2I9zIDzsnWelRyi-P00eH5AGhRMNwEikrGNAV7tqACJ9dzOyGSa7BkWefh-X6T2aexviP8f0vc0sFybID6Nvw-~~C9BscEnvwIxvIuc7GDXXDBo-1isGM-N3yrbMrWk07uw__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
Relationship between source depth d = a − rs (in km) and converged harmonic degree n of the DLNs [circles show DLNs; horizontal dash lines are zero lines of the DLNs at different source depths; inclined solid straight line shows the truncation criterion nMax = 10a/d from Sun & Okubo (1993)]. The DLN element h12 is used to show the convergent trend.
Since a fault can reach and cut the surface of the Earth, any computational method needs also to take care of this important special case. This has been a challenge for many existing methods, such as the normal-mode method, because of the convergence issue (Sun & Dong 2013). By making use of the reciprocity theorem, Sun & Dong (2013) derived the relation between the DLNs and the conventional tide, pressure and shear Love numbers to solve this problem. Since the DVP method proposed in this paper is a very stable and flexible one, it can be also applied to this special case directly. For example, Fig. 5 shows all the non-zero spheroidal DLNs versus degree n computed by our DVP method for this specific case (when the source is exactly located on the surface, i.e. d = 0), for degrees n all the way to 1 million. It can be observed from Fig. 5 that: (1) with increasing degree n, all the DLNs converge to their individual limits; (2) for all the DLNs, they converge to their asymptotic limits at different degree n, but they all converge at a degree n which is much smaller than n = 1 million; and (3) these DLN curves are consistent with equations in Section 3 of Sun & Dong (2013), except for the different factors used in defining the DLNs and in defining the vector spherical harmonics. For example, h33 = (2n + 1)/(4π) in eq. (66) in Sun & Dong (2013) is exactly identical to our result h33 = 1 as shown in Fig. 5, and similar equivalences can be found for l32 and lt32. Thus, Fig. 5 shows not only the flexibility of our analytical DVP method to the special surface dislocation case but also its accuracy in calculating the DLNs to a degree n, which can be much larger than the converged one.
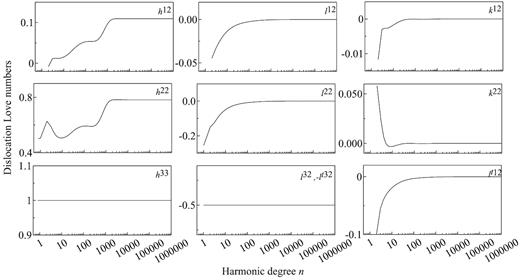
DLNs with source on the surface, that is depth d = 0, where h33, l32 and lt32 are also comparable with those in Sun & Dong (2013).
6.3 Effect of anisotropy
To show the effect of Earth anisotropy on DLNs, we compute two sets of DLNs for both isotropic and transversely isotropic earth models (i.e. using both ISO PREM and TI PREM). The results are depicted in Figs 6 and 7 for the source located at depth 20 and 100 km, respectively.
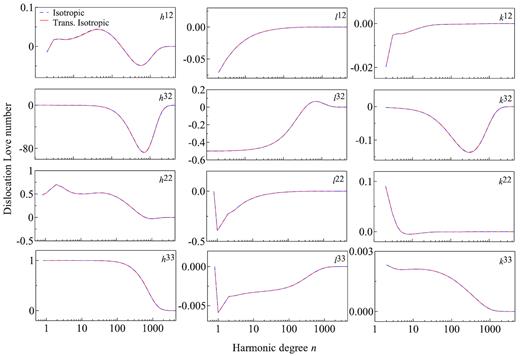
DLNs versus harmonic degree n with source at depth d = 20km: Comparison between isotropic ISO PREM (blue dashed line) and transversely isotropic TI PREM (red solid lines) earth models.
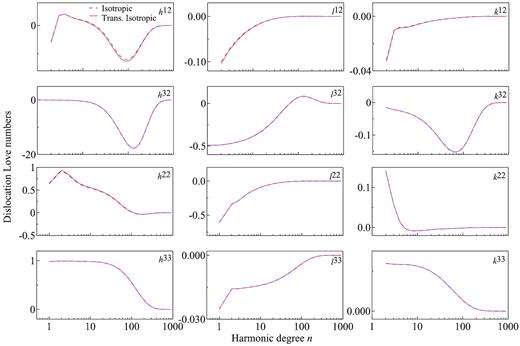
DLNs versus harmonic degree n with source at depth d = 100 km: Comparison between isotropic ISO PREM (blue dashed line) and transversely isotropic TI PREM (red solid lines) earth models.
It is observed from Fig. 6 that the effect of anisotropy (as invoked in the model PREM) on all the DLNs can be neglected except for h12 where slight difference between the two models can be seen when degree n < 100. We note that while the source is at 20 km, the anisotropy is located in the layers ranging from depth 200 to 24.4 km. Therefore, it is natural to ask if the effect of anisotropy on the DLNs would be the same if the source is located in the transversely isotropic layer. Shown in Fig. 7 are the comparison on the DLNs for the two models when the source is located at depth d = 100 km which is within the transversely isotropic layer. Compared to Fig. 6, it is observed from Fig. 7 that all the DLNs by the vertical strike-slip (with superscript pairs 12) are clearly affected by the anisotropy. There are large differences in h12 for harmonic degree ranging from n = 6 to about 400 (≈ 5 per cent at n = 69) and some differences in l12 for small degrees, say n < 10. There are also some tiny differences in k12 and in h22.
To show the difference of the DLNs between ISO and TI PREM models, we exclude the factor (rs/a)n and plot the results in Fig. 8 for the same case as shown in Fig. 7. Notice that although for the TI PREM model, the factor will be different from (rs/a)n, excluding the same factor out will help to see the difference clearly. It is indeed observed from Fig. 8 that with increasing degree n, the difference in DLNs between ISO and TI PREM models increases. While these differences are suppressed by the factor (rs/a)n, the effect of transverse isotropy on the DLNs could be significant when the fault is located in a shallow and anisotropic layer.

Similar to Fig. 7 but with factor (rs/a)n being excluded from both ISO and TI DLNs.
Again while in general the effect of anisotropy is relatively small based on the global TI PREM model, the capability of the present formulation and the corresponding MATLAB code with anisotropy would have potential applications in the following three areas: (1) due to the imbalance between tectonic stress and strain rate and other tectonic features, the effective properties of the rock materials could be strongly anisotropic (Cambiotti et al.2014), which could substantially alter the fault-induced response away from those of the isotropic model; (2) in the regional scale, many rocks in the lithosphere are also anisotropic (Pan et al.2014), and the influence of rock anisotropy can be strong; and (3) viscous anisotropy of the mantle materials could be very strong when studying the corresponding viscoelastic response (Hansen et al.2012).
7 CONCLUSIONS
We have developed an analytical method to compute all the DLNs using a special matrix propagating approach called DVP, for a spherically symmetric, non-rotating, perfectly elastic, transversely isotropic and self-gravitating Earth. Numerical comparisons show that the results computed by DVP method are in good agreement with those based on the other methods. However, the analytical DVP method is more stable and much faster than the alternatives.
As demonstrated in this paper, our software can calculate the DNLs to an arbitrarily high degree n so as to guarantee that the corresponding elastic dislocation Green's function can be computed with an accuracy of at least 10−5. Furthermore, our analytical DNLs are applicable to a surface rupture, that is when the point dislocation is located exactly on the Earth's surface.
The effect of the upper-mantle anisotropy of the Earth on the fault DNLs is very minor, except if the fault is vertical strike-slip located within the anisotropic layer.
SUPPORTING INFORMATION
GJI Paper I on DLNs Code and Manual Revised 0226 2019.docx
Figure S1. Comparison of the DLNs between the PREM and STW105 earth models for a point dislocation located at depth d = 20 km.
Table S1. Comparison of DLN h12 (different degrees n) for the point dislocation located at depth 20 km in the homogeneous mantle which is, respectively, subdivided into 129, 1025 and 16385 sublayers.
Table S2. Comparison of DLN l12 (different degrees n) for the point dislocation located at depth 20 km in the homogeneous mantle which is, respectively, subdivided into 129, 1025 and 16385 sublayers.
Table S3. Comparison of DLN k12 (different degrees n) for the point dislocation located at depth 20 km in the homogeneous mantle which is, respectively, subdivided into 129, 1025 and 16385 sublayers.
Please note: Oxford University Press is not responsible for the content or functionality of any supporting materials supplied by the authors. Any queries (other than missing material) should be directed to the corresponding author for the paper.
ACKNOWLEDGEMENTS
This study was financially supported by the National Natural Science Foundation of China projects (Grant Nos 41621091 and 41874026) (J. Zhou). The authors would like to thank the handling editor and the two reviewers for their constructive comments which have been very helpful in modifying the original version.
REFERENCES
APPENDIX A: VECTOR SPHERICAL HARMONICS
APPENDIX B: SPECIAL TREATMENTS FOR DEGREES n = 0 AND n = 1
B1 For degree n = 0
It is observed that the third equation in eq. (B1) is decoupled from the first two and hence it can be solved separately after the first two are solved.
Love (1911) derived the analytical solutions of eq. (B2) by assuming that the Earth is a homogeneous and isotropic elastic sphere. These solutions can be directly used here for the dislocation-induced deformation of degree n = 0.
Applying the variable transform as in Pan et al. (2015b), eq. (B6) can be changed to a set of differential equations with constant coefficients. Accordingly, the procedures are similar to those in Section 2 for n > 1 (but with a different and small matrix size).
B2 For degree n = 1
This indicates actually that the total force/traction acting on the Earth is zero, that is in equilibrium. As such, there are only two, instead of three, boundary conditions on the Earth's surface that are independent. Next, we choose two arbitrary initial solutions, i.e. two columns in the 6 × 3 matrix on the right-hand side of eq. (17a), and propagate them from the core–mantle boundary directly to the Earth's surface as done in Takeuchi & Saito (1972). The solutions thus obtained are called general solutions. Similarly, the source functions are also propagated from the source level to the Earth's surface. These solutions obtained are called particular solutions. Yet another solution is the rigid-body motion, which is [a, a, ag, 0, 0, 0]T. Finally, we combine the general, particular and rigid-body solutions together to satisfy the boundary conditions T(a) = 0 and Φ(a) = 0 on the surface. The latter condition means that the origin of the coordinate system is fixed on the centre of mass of the earth model. With the determined combination coefficients, the expansion coefficients U(a) on the surface can thus be derived.
It is interesting that if the second and third columns in eq. (17a) are chosen, one can find that the inner solid core contributes nothing to degree n = 1 solution. Generally, the solution has nothing to do with the inner solid core except for the parameters on the core side at the core–mantle boundary.
Finally therefore, the unknowns bi are determined from eqs (B11) and (B12), and the toroidal solution of n = 1 is obtained.
APPENDIX C: SOURCE FUNCTIONS
These source functions are identical to those in Takeuchi & Saito (1972) by considering the different definitions for the vector spherical harmonics (here we used the normalized system), except for a sign typo in the first term of ΔUN (should be |$\mp $|, instead of ± in Takeuchi & Saito (1972)).
APPENDIX D: GREEN'S FUNCTIONS OF POINT DISLOCATION
This Appendix D lists the Green's function expressions of the elastic displacement, gravity and geoid changes as well as gravity disturbance in terms of those defined in the main text. These expressions are similar to those in Sun & Okubo (1993) and Sun et al. (1996), but the different definition of DLNs should be noted. We provide below only the expressions due to a shear fault; the derivation of those corresponding to a tensile fault is similar and straightforward.
It is noted that only the vertical strike-slip and vertical dip-slip cause a toroidal deformation.
For geoid change, the expressions are identical to those of the vertical displacement if the DLNs in the vertical displacement is replaced by the DLNs corresponding to the incremental potential.
The incremental potential Φ is analogous to the disturbing potential in geodesy (Heiskanen & Moritz 1967). Therefore its radial derivative is gravity disturbance or gravity change at a space-fix point as defined by Sun & Okubo (1993). This gravity change can be directly observed by satellite gravimetry such as GRACE (Tapley et al.2004). We should mention the work by Cambiotti & Sabadini (2015) where the response to a fault system can be evaluated beyond the epicentral reference frame.
On the other hand, an instrument on the Earth's surface detects different gravity changes due to ground motion. The free-air gravity gradient is commonly used to account for the ground motion induced gravity change (e.g. Sun & Okubo 1993).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}