






Abstract
For considering elastic seismic wave propagation in large domains, efficient absorbing boundary conditions are required with numerical modelling in finite domains. Since their introduction by Bérenger, the perfectly matched layers (PML) has become the state-of-the art method because of its efficiency and ease of implementation. However, for anisotropic media, theoretical analysis and numerical experiments show that the PML method is amplifying, that is it exhibits numerical instabilities. Numerical experiments can also exhibit numerical instabilities of the PML when dealing with long time simulations even for isotropic media, especially for finite element methods in unstructured grids. Recently, a new method, called SMART layers approach, has been proposed. This method is shown to be stable even for anisotropic media. The drawback is that the SMART layers are not perfectly matched. We have implemented this new approach in a discontinuous Galerkin method and we illustrate that this method does not exhibit numerical instabilities while PML do for an isotropic elastodynamic simulation. We show that this approach is also competitive with respect to the PML method in terms of efficiency and computational cost.
1 INTRODUCTION
For seismic wave propagation, we often consider the Earth as a semi-infinite medium. However, for the wavefield numerical computation, the domain of computation must be finite and as small as possible. Hence, we need to design absorbing boundary conditions (ABC) or absorbing layers at the edges of our numerical domain to avoid spurious reflections. The first-order ABC were introduced by Clayton & Engquist (1977). For planar waves perpendicular to a rectilinear edge, outgoing waves are fully absorbed. For 2-D and 3-D geometries, the waves arriving at oblique incidences are only partially absorbed and significant spurious reflections are observed at grazing angles. High-order ABC have been proposed to improve the performance of the first-order conditions. For example, Collino (1993) have proposed fractional high-order derivatives, but their implementation is not trivial, and the method is computationally intensive.
The alternative for the absorption of outgoing waves is the introduction of a layer beyond the edge where the wave is damped. In this strategy, the outgoing waves are slowly attenuated as they go deeper into the layer, while preventing any induced incoming wave. Cerjan et al. (1985) have introduced this strategy where a damping profile is designed inside the sponge layer with a significant efficient performance for grazing angles. Unfortunately, this technique induces also unwanted reflections between the domain of interest and the absorbing layer. A careful design of the damping profile is needed for the mitigation of these reflections, leading to rather thick layers. An improved method has been proposed by Bérenger (1994) for the Maxwell's equation as the impedance matching is perfect between the domain of interest and the absorbing layer in the continuum media: the reflection coefficient is exactly equal to zero at this interface. Unfortunately, after the domain discretization for numerical simulation, this property disappears and small reflections are generated. Even so, this approach turns out to be more efficient than any precedent strategy and since then they have been continuously developed in different domains of wave simulation.
For elastodynamics it has been used and investigated exhaustively (e.g. Chew & Liu 1996; Hastings et al.1996; Collino & Tsogka 2001; Komatitsch & Tromp 2003). A successful modification to the perfectly matched layer (PML) strategy is the convolutional PML (C-PML), introduced by Komatitsch & Martin (2007), which improves the absorption at grazing angles and reduces the memory requirements. A strategy proposed to improve the stability of the PMLs is the modified PML (M-PML) method, which introduces additional absorbing terms in the directions tangential to the interface between the domain of interest and the absorbing layer. The M-PML strategy loses the perfectly matched property, even at the continuous level, but it has shown to be still efficient for practical applications, at the expense of making the PML thicker (Dmitriev & Lisitsa 2011).
Etienne et al. (2010) applied the C-PML in a discontinuous Galerkin method (DGM) based on an unstructured meshing domain description and reported long-time instabilities, like those reported by Meza-Fajardo & Papageorgiou (2008) using PML. Etienne et al. (2010) introduced additional damping in the directions parallel to the interface mixing the C-PML and the M-PML strategies which allows a time delay in the occurrence of these instabilities. This new strategy was called modified C-PML (M-CPML) and, even though it has proved to be successful in delaying the instabilities, it is unable to fully prevent them.
Many studies on the accuracy of PML approaches have been done (e.g. Martin et al.2008; Meza-Fajardo & Papageorgiou 2010, 2012). Recently, Zhinan et al. (2014) improved the C-PML stability by using a singularity removal process. However for high-order space approximations, instabilities could still appear in practical situations, even if they can be delayed by using a stretching factor.
As we have observed that these instabilities may dramatically complicate the design of the numerical modelling (different meshes, absorbing layer size and damping profiles should be tried for avoiding these instabilities in the working time window), we investigate an alternative strategy based on the so-called SMART absorbing layers with nice mathematical properties of bounded discrete energy over time introduced by Halpern et al. (2011). Inside the SMART layer, the wavefield is locally decomposed into components propagating inward and outward with respect to the boundary against which waves should be attenuated. A selective damping is applied progressively for outgoing waves as they enter inside the SMART layer. This specific damping of outgoing waves is performed by an additional zero-order operator extracted from the decomposition of the operator related to the first-order hyperbolic system. Unlike PML, SMART layers are intrinsically dissipative as soon as the hyperbolic system on which they are applied satisfies a symmetrizability condition. Métivier et al. (2014a) have demonstrated the robustness of the SMART layers for anisotropic acoustic media. They prove that the associated first-order hyperbolic system is symmetrizable, and they construct the corresponding zero-order dissipative term. Finite-differences numerical examples are provided. Stable results are obtained with the SMART layer while the PMLs exhibit an amplifying behaviour.
We show how to use this strategy with DGM with unstructured meshes. We concentrate on 2-D elastodynamics but the extension to 3-D geometries does not introduce new features. We shall show that the first order hyperbolic system for elastodynamics satisfies also the symmetrizability condition required for the SMART approach. We present how to compute the zero-order term introduced when applying the SMART layers. Then we shall show how they can be introduced in a DGM approach. We shall compare the SMART layers versus the C-PML approach in a specific example where long time instabilities appear.
2 SMART LAYERS FOR ELASTODYNAMICS AND THE DGM
2.1 SMART equations
The SMART layer consists in the addition of a zero-order term, called SMART term, to the general hyperbolic system (14) that will damp the outgoing wavefield. For the smart selection of the damped wavefields an eigendecomposition is done for the space linear operators |$\mathbf {\tilde{A}}_\theta$|, for θ ∈ {x, y}. The SMART term projects the wavefield in the eigenspace span by the eigenvectors associated to the different eigenvalues of |$\mathbf {\tilde{A}}_\theta$|. It only damps the outgoing part of the wavefield. The SMART term construction and addition is explained ahead.
The linear operator |$\mathbf {\tilde{A}}_x$| has five eigenvalues of multiplicity 1 with four non-zero eigenvalues, related to the P-wave velocity, α, and the S-wave velocity, β. The fifth one is zero. The four non-zero eigenvalues with their corresponding eigenvector are given in Table 1. The linear operator |$\mathbf {\tilde{A}}_y$| also has five eigenvalues of multiplicity 1, with four non-zero eigenvalues. They are given in Table 2 with their corresponding eigenvectors. These eigenvectors are not identical to those of |$\mathbf {\tilde{A}}_x$|.
Non-zero eigenvalues and their corresponding eigenvector of |$\mathbf{\tilde{A}}_x$|.
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{x_P}^+=\alpha$| | |$\vec{\mathbf {v}}_{x_P}^+=\left[1 \quad 0 \quad {-}(\lambda +\mu )/\alpha \quad {-}\mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_P}^-=-\alpha$| | |$\vec{\mathbf {v}}_{x_P}^-=\left[1 \quad 0 \quad (\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_S}^+=\beta$| | |$\vec{\mathbf {v}}_{x_S}^+=\left[0 \quad {-}\beta /\mu \quad 0 \quad 0 \quad 1 \right]^T$| |
| |$e_{x_S}^-=-\beta$| | |$\vec{\mathbf {v}}_{x_S}^-=\left[0 \quad \beta /\mu \quad 0 \quad 0 \quad 1\right]^T$| |
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{x_P}^+=\alpha$| | |$\vec{\mathbf {v}}_{x_P}^+=\left[1 \quad 0 \quad {-}(\lambda +\mu )/\alpha \quad {-}\mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_P}^-=-\alpha$| | |$\vec{\mathbf {v}}_{x_P}^-=\left[1 \quad 0 \quad (\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_S}^+=\beta$| | |$\vec{\mathbf {v}}_{x_S}^+=\left[0 \quad {-}\beta /\mu \quad 0 \quad 0 \quad 1 \right]^T$| |
| |$e_{x_S}^-=-\beta$| | |$\vec{\mathbf {v}}_{x_S}^-=\left[0 \quad \beta /\mu \quad 0 \quad 0 \quad 1\right]^T$| |
Non-zero eigenvalues and their corresponding eigenvector of |$\mathbf{\tilde{A}}_x$|.
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{x_P}^+=\alpha$| | |$\vec{\mathbf {v}}_{x_P}^+=\left[1 \quad 0 \quad {-}(\lambda +\mu )/\alpha \quad {-}\mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_P}^-=-\alpha$| | |$\vec{\mathbf {v}}_{x_P}^-=\left[1 \quad 0 \quad (\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_S}^+=\beta$| | |$\vec{\mathbf {v}}_{x_S}^+=\left[0 \quad {-}\beta /\mu \quad 0 \quad 0 \quad 1 \right]^T$| |
| |$e_{x_S}^-=-\beta$| | |$\vec{\mathbf {v}}_{x_S}^-=\left[0 \quad \beta /\mu \quad 0 \quad 0 \quad 1\right]^T$| |
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{x_P}^+=\alpha$| | |$\vec{\mathbf {v}}_{x_P}^+=\left[1 \quad 0 \quad {-}(\lambda +\mu )/\alpha \quad {-}\mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_P}^-=-\alpha$| | |$\vec{\mathbf {v}}_{x_P}^-=\left[1 \quad 0 \quad (\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \right]^T$| |
| |$e_{x_S}^+=\beta$| | |$\vec{\mathbf {v}}_{x_S}^+=\left[0 \quad {-}\beta /\mu \quad 0 \quad 0 \quad 1 \right]^T$| |
| |$e_{x_S}^-=-\beta$| | |$\vec{\mathbf {v}}_{x_S}^-=\left[0 \quad \beta /\mu \quad 0 \quad 0 \quad 1\right]^T$| |
Non-zero eigenvalues and their corresponding eigenvector of |$\mathbf{\tilde{A}}_y$|.
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{y_P}^+=\alpha$| | $\vec{\mathbf {v}}_{y_P}^+=\left[\begin{array}{ccccc}0 \quad 1 \quad -(\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_P}^-=-\alpha$| | $\vec{\mathbf {v}}_{y_P}^-=\left[\begin{array}{ccccc}0 \quad 1 \quad (\lambda +\mu )/\alpha \quad -\mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_S}^+=\beta$| | $\vec{\mathbf {v}}_{y_S}^+=\left[\begin{array}{ccccc}-\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| |$e_{y_S}^-=-\beta$| | $\vec{\mathbf {v}}_{y_S}^-=\left[\begin{array}{ccccc}\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{y_P}^+=\alpha$| | $\vec{\mathbf {v}}_{y_P}^+=\left[\begin{array}{ccccc}0 \quad 1 \quad -(\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_P}^-=-\alpha$| | $\vec{\mathbf {v}}_{y_P}^-=\left[\begin{array}{ccccc}0 \quad 1 \quad (\lambda +\mu )/\alpha \quad -\mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_S}^+=\beta$| | $\vec{\mathbf {v}}_{y_S}^+=\left[\begin{array}{ccccc}-\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| |$e_{y_S}^-=-\beta$| | $\vec{\mathbf {v}}_{y_S}^-=\left[\begin{array}{ccccc}\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
Non-zero eigenvalues and their corresponding eigenvector of |$\mathbf{\tilde{A}}_y$|.
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{y_P}^+=\alpha$| | $\vec{\mathbf {v}}_{y_P}^+=\left[\begin{array}{ccccc}0 \quad 1 \quad -(\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_P}^-=-\alpha$| | $\vec{\mathbf {v}}_{y_P}^-=\left[\begin{array}{ccccc}0 \quad 1 \quad (\lambda +\mu )/\alpha \quad -\mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_S}^+=\beta$| | $\vec{\mathbf {v}}_{y_S}^+=\left[\begin{array}{ccccc}-\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| |$e_{y_S}^-=-\beta$| | $\vec{\mathbf {v}}_{y_S}^-=\left[\begin{array}{ccccc}\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| Eigenvalues | Eigenvectors |
|---|---|
| |$e_{y_P}^+=\alpha$| | $\vec{\mathbf {v}}_{y_P}^+=\left[\begin{array}{ccccc}0 \quad 1 \quad -(\lambda +\mu )/\alpha \quad \mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_P}^-=-\alpha$| | $\vec{\mathbf {v}}_{y_P}^-=\left[\begin{array}{ccccc}0 \quad 1 \quad (\lambda +\mu )/\alpha \quad -\mu /\alpha \quad 0 \end{array}\right]^T$ |
| |$e_{y_S}^+=\beta$| | $\vec{\mathbf {v}}_{y_S}^+=\left[\begin{array}{ccccc}-\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
| |$e_{y_S}^-=-\beta$| | $\vec{\mathbf {v}}_{y_S}^-=\left[\begin{array}{ccccc}\beta /\mu \quad 0 \quad 0 \quad 0 \quad 1 \end{array}\right]^T$ |
2.2 Discontinuous Galerkin method
The proposed DGM, eqs (26) and (27), uses a second-order explicit leap-frog scheme for the time integration and a centred scheme for the fluxes evaluation. The combination of this two makes the DGM energy conservative, efficient and easy to program. However more sophisticated DGM schemes have been successfully proposed, as the ADER-DG proposed by Käser & Dumbser (2006) who uses a modal representation, upwind fluxes and the ADER time integration approach.
3 NUMERICAL TEST
We perform the numerical comparison between the C-PML and SMART layers with a very simple model, where long-term C-PML instabilities appear with the DGM scheme. The C-PML implementation is done following the work of Etienne et al. (2010). The ordinary differential equations, related with the memory variables introduced, are solved with the same DGM scheme used to update the velocity–stress hyperbolic system. We consider an homogeneous half-space 10 000 m width and 5000 m depth with the physical parameters α = 4000 m s−1, β = 2310 m s−1 and ρ = 2000 kg m−3. The source is a Ricker pulse with a dominant frequency of 3 Hz located near the free surface at the middle of the domain xs = 0 m and zs = 10 m. The domain is discretized using a conforming unstructured triangular mesh. We used quadratic interpolation functions inside each triangle, P2 elements, so the mesh ensures three elements per minimum wavelength. The total simulation time is 30 s.
3.1 C-PML instabilities and SMART comparison
Absorbing boundary layers are defined at the two lateral sides and at the bottom of the domain. On top we apply a free surface boundary condition. The C-PMLs width is 10 elements, as proposed by Etienne et al. (2010) when using a DGM approach. The damping profile are the ones presented in Section 2. The Fig. 1 presents snapshots of vx at different times of the simulation. We observe that the C-PMLs absorb effectively the outgoing waves. However, a strong amplification coming from the layer appears later. This can also be observed in Fig. 2(a) where we present seismograms for vx and vy obtained using receivers located along the free-surface at the same depth than the source.
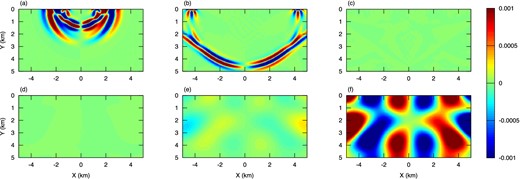
Snapshots of vx while including 10-element width C-PMLs at both lateral sides and the bottom of the model at: (a) 1 s, (b) 2.4 s, (c) 5 s, (d) 15 s, (e) 25 s and (f) 30 s.
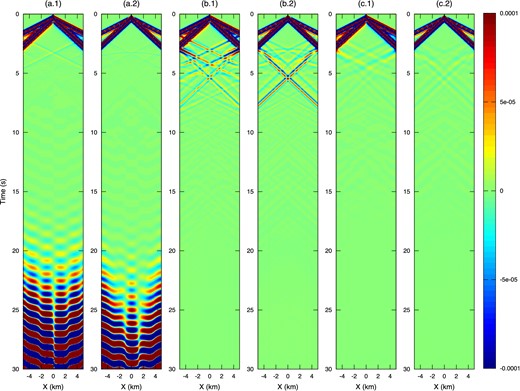
Seismograms of vx and vy for 10-elements C-CPML, (a.1) and (a.2), respectively, 10-elements SMART layers, (b.1) and (b.2), respectively, and 20-elements SMART layers, (c.1) and (c.2), respectively. The scale is saturated two orders below the average of the velocity wavefield to better distinguish the reflections.
We reproduce this test using 10 elements SMART layers, keeping the same mesh and damping profile used for the C-PMLs. We show in Fig. 2(b) that the SMART layers do not suffer from the amplification phenomenon. However, the coupling between the simulation domain and the SMART layers is not as satisfactory as the one obtained with a C-PML. Particularly, for waves propagating at grazing angles, we observe stronger reflections at the interface between the domain of interest and the layer (from 3 to 8 s). In order to reduce the magnitude of the reflections at the order of magnitude of the C-PML reflections, we can increase the width of the SMART layers from 10 to 20 elements. The seismograms for 20 elements SMART layers are given in Fig. 2(c).
To prove the robust dissipative property of the SMART layers, we run the same configuration using 20 elements SMART layers but we increase the total simulation time from 30 to 300 s. In Fig. 3, we present the history of the kinematic energy. The decrease is very fast at the beginning of the simulation. After reaching several orders of magnitude below the magnitude of the wavefield propagated, it seems that the noise level is attained. The kinematic energy keeps being attenuated at a small rate. This emphasizes the dissipative property of the SMART layers.
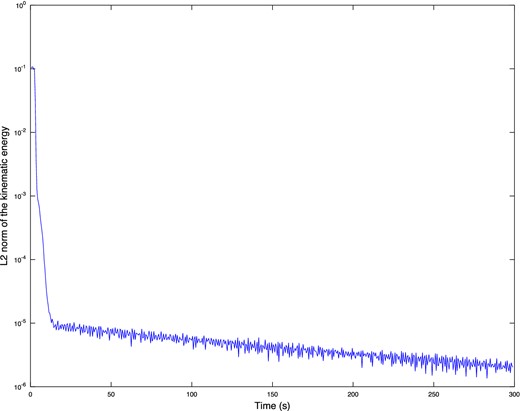
History of the L2 norm of the kinematic energy using 20-elements SMART layers which decreases with time until the noise level.
The increase of the number of elements in the SMART layers makes the computation more expensive. This is necessary to reach the same level of accuracy than the one achieved with the C-PMLs. However, as can be seen in Table 3, an additional feature of the SMART layers method is that for a given width of the layer, it requires less memory and less Floating Point Operations (FLOP's) than C-PMLs. The data presented in Table 3 depend on our specific implementation. However, looking at the system eqs (23) and (24), it is clear that independently of the numerical scheme for a given absorbing layer width, SMART layers are cheaper in memory and time than C-PMLs because it only consists in the introduction of a zero-order term, and do not require additional memory variables with their respective ordinary differential equations. For our implementation, with 20 elements SMART layers (78.16 per cent SMART elements from the total of elements in the mesh), using Table 3, we can compute that they are approximately 1.1 more time consuming and 1.2 more memory expensive than 10 elements C-PMLs (36.32 per cent CPML elements from the total of elements in the mesh). This is the small price we have to pay to avoid the C-PML instabilities that, as can be seen in Figs 2(a), starts polluting the velocities fields a few seconds after the wavefield has reached the layers. These factors are even smaller when the ratio between the domain elements and absorbing boundary elements increases.
Memory and FLOP comparison between the C-PML and the SMART layers using P2 elements in our DGM implementation. The ‘Element’ columns consider the whole memory and FLOP's per P2 element inside the absorbing layer during an update step. While the ‘Abs. layer’ columns involve the memory and FLOP's required only by the absorbing layer operations by P2 element inside the absorbing layer during an update step.
| Memory (bytes) | FLOP | |||
|---|---|---|---|---|
| Element | Abs. layer | Element | Abs. layer | |
| C-PML | 468 | 256 | 5073 | 2262 |
| SMART | 332 | 120 | 3141 | 330 |
| C-PML/SMART | 1.409 | 2.133 | 1.615 | 6.854 |
| Memory (bytes) | FLOP | |||
|---|---|---|---|---|
| Element | Abs. layer | Element | Abs. layer | |
| C-PML | 468 | 256 | 5073 | 2262 |
| SMART | 332 | 120 | 3141 | 330 |
| C-PML/SMART | 1.409 | 2.133 | 1.615 | 6.854 |
Memory and FLOP comparison between the C-PML and the SMART layers using P2 elements in our DGM implementation. The ‘Element’ columns consider the whole memory and FLOP's per P2 element inside the absorbing layer during an update step. While the ‘Abs. layer’ columns involve the memory and FLOP's required only by the absorbing layer operations by P2 element inside the absorbing layer during an update step.
| Memory (bytes) | FLOP | |||
|---|---|---|---|---|
| Element | Abs. layer | Element | Abs. layer | |
| C-PML | 468 | 256 | 5073 | 2262 |
| SMART | 332 | 120 | 3141 | 330 |
| C-PML/SMART | 1.409 | 2.133 | 1.615 | 6.854 |
| Memory (bytes) | FLOP | |||
|---|---|---|---|---|
| Element | Abs. layer | Element | Abs. layer | |
| C-PML | 468 | 256 | 5073 | 2262 |
| SMART | 332 | 120 | 3141 | 330 |
| C-PML/SMART | 1.409 | 2.133 | 1.615 | 6.854 |
4 CONCLUSIONS AND PERSPECTIVES
The SMART layers is a robust alternative to PML approaches for elastodynamic simulations. They are easier to implement and for a given absorbing layer width faster than C-PMLs. We showed that they are robust in a case where C-PMLs are unstable. However, since the SMART layers are not perfectly matched, stronger reflections than those observed in the C-PML approach are generated. In order to increase the efficiency of the SMART layers to the same level of the C-PMLs, we had to double the width of the SMART layers. However, this only implies a small cost of time and memory in comparison with the C-PML approach, as the SMART layers only consist in introducing a zero-order term in the initial system.
For 3-D simulations, the SMART layers width enlargement would increment the ratio of SMART layers elements with respect to regular elements. Nonetheless, the gap of the element memory and FLOP's requirements between SMART and C-PMLs increases too. We believe that the sum of both effects would preserve the 2-D relative cost of the SMART layers for 3-D simulations. Furthermore, for anisotropic elastodynamic simulations, the SMART layers relative cost should be smaller than for isotropic elastodynamic simulations. The anisotropy implies cross-derivatives that would increase the amount of memory variables required by the C-PML strategy.
We believe that SMART layers could be very useful for long time 3-D elastodynamics simulations in regional scales for seismic hazard evaluation where C-PML instabilities could appear. Further studies to better match the SMART layers should be done to decrease the layer's width.
We thank Andreas Fichtner and Roland Martin for their remarks and suggestions. This work has been supported by the French Agence Nationale de la Recherche under the grant ANR-2011-BS56-017 and partially funded by sponsors of the SEISCOPE II consortium (http://seiscope2.osug.fr) and from the European Community's Seventh Framework Programme [FP7/2007-2013] under the grant agreement PEOPLE-2011-IRSES 295217.

{kind=link}
{kind=link}
{kind=link}