






Summary
A number of methods have been developed over the last few decades to model the gravitational gradients using digital elevation data. All methods are based on second-order derivatives of the Newtonian mass integral for the gravitational potential. Foremost are algorithms that divide the topographic masses into prisms or more general polyhedra and sum the corresponding gradient contributions. Other methods are designed for computational speed and make use of the fast Fourier transform (FFT), require a regular rectangular grid of data, and yield gradients on the entire grid, but only at constant altitude. We add to these the ordinary numerical integration (in horizontal coordinates) of the gradient integrals. In total we compare two prism, two FFT and two ordinary numerical integration methods using 1″ elevation data in two topographic regimes (rough and moderate terrain). Prism methods depend on the type of finite elements that are generated with the elevation data; in particular, alternative triangulations can yield significant differences in the gradients (up to tens of Eötvös). The FFT methods depend on a series development of the topographic heights, requiring terms up to 14th order in rough terrain; and, one popular method has significant bias errors (e.g. 13 Eötvös in the vertical–vertical gradient) embedded in its practical realization. The straightforward numerical integrations, whether on a rectangular or triangulated grid, yield sub-Eötvös differences in the gradients when compared to the other methods (except near the edges of the integration area) and they are as efficient computationally as the finite element methods.
1 Introduction
Since the time that it could be measured, more than 100 years ago (Szabo 1998), the gravitational gradient has been the subject of study in physics, geophysics, and geodesy, even though its measurement is far from easy and the instrumentation must be exquisitely precise to be of any use. Eötvös's extraordinary yet cumbersome static gradiometer, in fact, was quickly replaced in the 1930's and 1940's by the portable relative gravimeter when the latter achieved sufficient accuracy for geophysical exploration. Requiring only a fraction of the time to make a measurement, the gravimeter became the stalwart of both geophysical and geodetic gravimetric surveys. Gradiometers experienced a resurgence, at least on paper initially, with the advent of satellites (specifically, planetary probes) since only the curvature of the gravitational potential field can be sensed on a freely falling body (such as a satellite). To date, no gradiometer has managed to fly in space as other modes of gravitational field measurement by satellites (precise orbital tracking) proved less expensive and were already at hand. Airborne gradiometry, analogously, was considered in the 1970's to solve the problem of inseparability of inertial and kinematic acceleration that besets any gravimeter (or accelerometer) on a moving platform (the basic physical principles are identical to the case of the satellite). Again, the development of other technology thwarted the gradiometer's rightful place in moving-base gravimetry. GPS positioning quickly developed to a level of precision that kinematic accelerations could be determined independently with commensurate accuracy.
Gradiometer technology continued undaunted with the promise of eventual deployment in space; and, after two potential missions were abandoned, an Earth-orbiting gradiometer is now firmly scheduled for launch in 2007 (Drinkwater 2003). Near-surface deployments also continued since the partially successful demonstrations in the 1980's (Jekeli 1988, 1993). Recent successes in geophysical exploration (van Leeuwen 2000) have once again brought the gradiometer to the fore, and new technology developments associated with atom interferometry (McGuirk 2002; Jekeli 2004) promise accuracy as well as efficiency in instrumentation (thus reducing cost and increasing resolution in the measurements).
The utility of gravitational gradiometer (as opposed to the gravimeter) is well known (e.g. Heiland 1940; Hammer & Anzoleaga 1975; Dransfield 1991; Marson & Klingele 1993). Being more sensitive to the near surface density contrasts and with higher acuity, the gradiometer should be better able to discern mineral deposits and small-scale, near-surface geologic features. Moreover, gradient-measuring instruments generally provide multiple components of the full gradient tensor; and, in principle, measuring the full tensor yields five independent characteristics of the field compared to only three provided by the gravitational vector.
As with any sensor, its full potential can be realized best if the signal is nulled (or, at least substantially reduced) with prior information, so that the sensed quantity is a small residual to an otherwise computed and known field. We already have quite detailed and accurate models of the Earth's gravitational potential field (e.g. EGM96, Lemoine 1998), which imply a corresponding gradient field. However, the spatial resolution of such global models is limited (to about 50 km half wavelength for EGM96); and, while local gravimetric surveys might yield models with a resolution as fine as a few kilometres, at 100 m altitude, 90 per cent of the gravitational gradient signal resides in wavelengths shorter than several hundreds of metres (after accounting for the Earth's ellipsoidal bulk). Closer to the topographic surface, the signal is even more sensitive to the very near masses (which also contributed to the downfall of the gradiometer in favour of the gravimeter that is less overwhelmed by close, possibly non-permanent density contrasts). Thus, very detailed models of the known field should be constructed for gradiometric surveys.
Aside from the gradients implied by global and local gravimetric models, finer resolution can be obtained from the effect of the visible topography, since elevation data generally have higher resolution than gravity data. Toward this end, a number of computational algorithms have been developed based on a planar approximation of the height reference surface and a presumed density within the topographic masses. We adopt these approximations with the objective of evaluating the methods in terms of their relative precision and efficiency. The larger question of how much of the topographic signal is already contained in global and local gravitational models, while not addressed here, is assumed to leave unchanged the essential conclusions obtained here.
Analyses of gradient models from topographic data have been conducted in the past. For example, Tziavos (1988) and Schwarz (1990) considered methods exclusively based on Fourier transform techniques (also analyzed herein).
2 Gravitational Gradients




3 Gradient Models




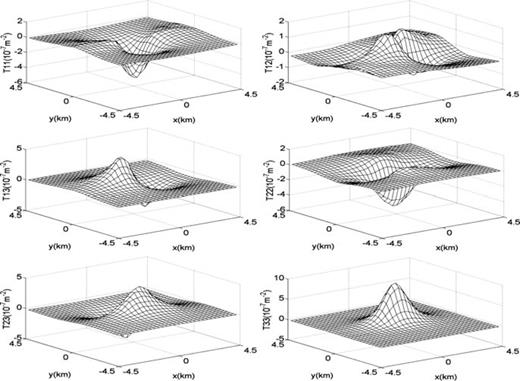
Kernel functions, Tjk, for a typical topographic function, h.

For n= 1, representing a polyhedron, Petrovic (1996) and Tsoulis & Petrovic (2001) have derived comprehensive formulas for the potential and its first and second derivatives. Rather than repeating these formulas, which include several special cases that avoid singularities, we refer to the documents (ibid.) where they are derived and note only that our application is limited to the case where the topographic surface is triangulated by the given height data. Each triangle-topped prism may have a different density, but we assume a constant value as before. Fig. 2 illustrates the geometry for the two prism methods.
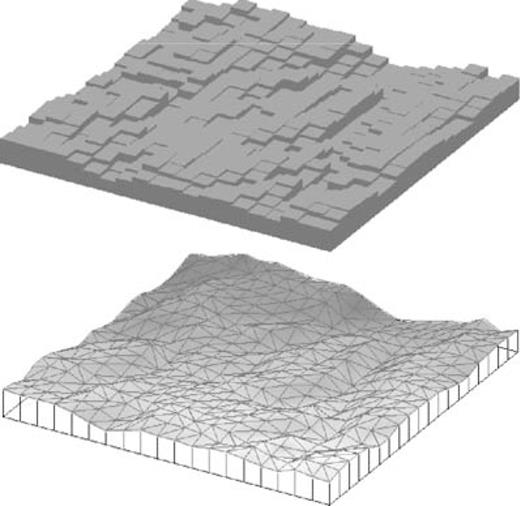
Geometries of rectangular (top) and triangular prism (bottom) representations of the topographic masses.


All of these methods may be computationally too intensive if many gradients are needed in an area and the height data set is large. One can employ Fourier transform techniques to reduce the number of computations significantly provided the height data are on a regular Cartesian grid and the computation points are on that same grid. The following two algorithms take advantage of the fast Fourier transform (FFT).
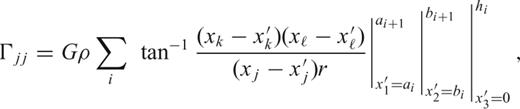
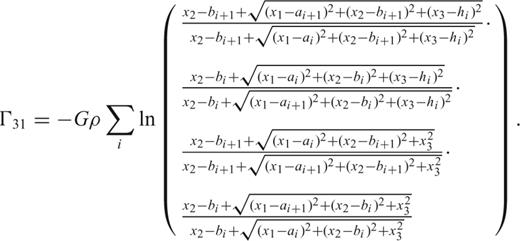
 . Integrating eq. (15) with respect to x′3, we find that
. Integrating eq. (15) with respect to x′3, we find that 








 is easily derived, for example, for F33:
is easily derived, for example, for F33: 

 and h
and h be such functions. The FFT and its inverse are defined as follows (with m1, p1, n1= 0, …, M1− 1; m2, p2, n2= 0, …, M2− 1):
be such functions. The FFT and its inverse are defined as follows (with m1, p1, n1= 0, …, M1− 1; m2, p2, n2= 0, …, M2− 1): 

 and h
and h is defined as
is defined as 




 , such that it is like the result of an FFT applied to a discrete, periodic function. Only this will ensure that the computed gradients are real numbers. That is, in addition to periodicity,
, such that it is like the result of an FFT applied to a discrete, periodic function. Only this will ensure that the computed gradients are real numbers. That is, in addition to periodicity, 
 , must satisfy conjugate symmetry:
, must satisfy conjugate symmetry: 
 , defined by eq. (34) with coefficient, μjk, given by any of the eqs (19), satisfies the conjugate symmetry property provided that one sets
, defined by eq. (34) with coefficient, μjk, given by any of the eqs (19), satisfies the conjugate symmetry property provided that one sets 
 is obtained for p1= 0, …, M1− 1, p2= 0, …, M2− 1 by first computing its values according to eq. (34) for p1=−M1/2, …, M1/2 − 1 and p2=−M2/2, …, M2/2 − 1, and then using eqs (35) and (37) (if χ(n)
is obtained for p1= 0, …, M1− 1, p2= 0, …, M2− 1 by first computing its values according to eq. (34) for p1=−M1/2, …, M1/2 − 1 and p2=−M2/2, …, M2/2 − 1, and then using eqs (35) and (37) (if χ(n) is imaginary). The conjugate symmetry property is satisfied in these cases.
is imaginary). The conjugate symmetry property is satisfied in these cases.We mention a third type of Fourier transform method that simply applies the convolution theorem to the first of eq. (7), viewed as a 3-D convolution. In this case the density function may be variable in all dimensions and no series expansions are required in the height coordinate (Peng 1995). This method is outside the present scope and requires careful study of potential deleterious effects due to the sharp density contrast at the topographic boundary.
4 Numerical Tests
We compared the terrain-based models for the gravitational gradient using digital elevation data in the western and mid-western U.S. Fig. 3 shows the terrain variation as represented by 1″× 1″ gridded heights. Each area represents a 10′× 10′ spherical patch that is approximated as a plane with grid intervals given, in metres, by Δx′1= 1″η cos φm [m], Δx′2= 1″η [m], where φm is the mean latitude of the patch and η is the arcsec-to-metre conversion factor for a sphere of radius, R= 6371 km. The density of the topographic masses is assigned the constant value, ρ= 2670 kg m−3. Without loss in generality, the masses included in the various gradient models are bounded below by the minimum elevation in each area, while the points of evaluation are located at constant height, Δx3, above the maximum elevation: x= (x1, x2, x03), where x03=x′3,max+Δx3; in our tests, Δx3= 10 m (see Fig. 4). The evaluation points have horizontal coordinates, (x1, x2), identical to the grid points of the terrain elevation data, and lie along a single profile across each test area, as indicated in Fig. 3. The heights of these computation profiles with respect to the underlying topography are shown in Fig. 4, which also shows the gradient, Γ33; the other gradients have roughly similar magnitude.
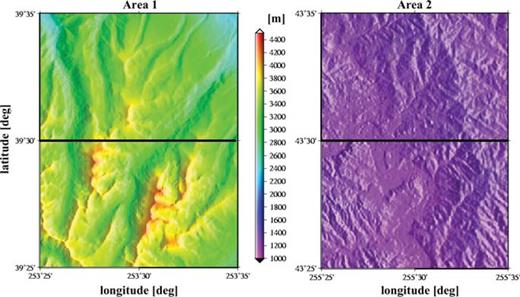
1″× 1″ elevation data in two 10′× 10′ test areas. Left: Area 1 (central Colorado); Right: Area 2 (eastern Wyoming). Computation profiles run through the middle from west to east. The elevation range for Area 1 is 2400 ≤h≤ 4265 m, and for Area 2 it is 1000 ≤h≤ 1315 m.
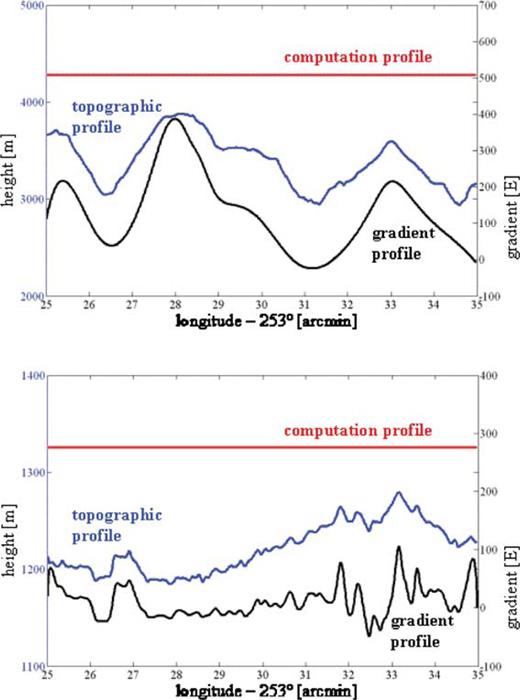
Profiles of topography (left ordinate axis) and Γ33 (right ordinate axis) for Area 1 (top) and Area 2 (bottom). Also shown is the height of the computation profile. The gradient axes are in units of 1 E = 1 Eötvös =10−9 s−2.

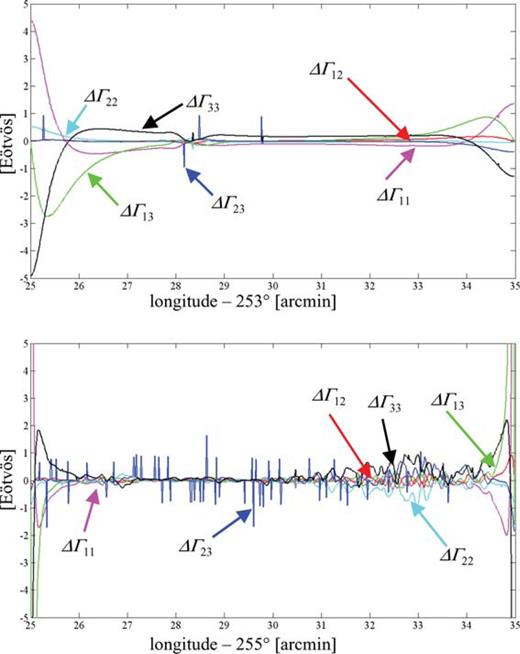
An absolute or external evaluation of the gradient models, on the other hand, requires a truth model that represents the actual gradients due to the topographic masses. At best, such a model can only be conjectured since the terrain elevation data are discrete. For example, one might use the triangulated terrain approximated by piecewise continuous, first-order polynomials (i.e. a polyhedron) to represent the actual topographic surface. Petrovic's formulas (Petrovic 1996; Tsoulis & Petrovic 2001) provide exact corresponding gradients. On the other hand, this‘true’ representation depends on the type of triangulation—for example, since the grid is regular a straightforward (Delauney) triangulation yields grid diagonals that are either in the southeast–northwest direction, or in the southwest–northeast direction, or a combination of these. Fig. 5 shows the differences in the gradients generated by two alternative triangulations, where all diagonals are either in one or the other direction. The noticeably dissimilar character of the differences in these two areas is an artefact of the parameters of the test and the properties of the terrain models. The differences reach 10–20 E for some of the gradients in the rough Area 1 even though the computation points are substantially further from the generating masses than in the smooth Area 2, where the differences are less than 1 E. Fig. 6 hints at the reason for the large discrepancies in Area 1, showing that with all diagonals in the southeast–northwest orientation, the height differences along the diagonals are relatively more uniform than with the alternative orientation. In the smoother Area 2, the distribution of height differences along diagonals is almost independent of their orientation and the gradient differences are likewise close to zero (see Fig. 5). The essential conclusion is that a‘truth’ model eludes our present analysis. Such a model would have to depend uniquely on the data in a manner that best represents the consequent gravitational gradients. Data-dependent triangulation methods may be found in (Dyn 1989), but additional analyses must determine if they optimally represent the gradients.
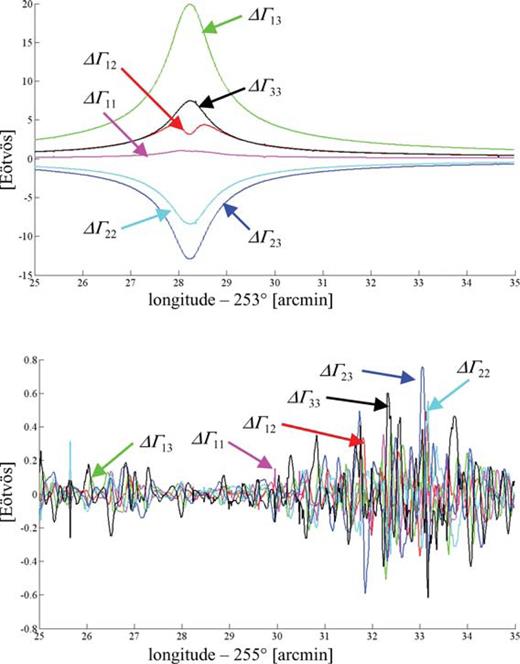
Differences between gradients generated by triangulated prisms of the DEM using southwest–northeast and southeast–northwest diagonals. Top: profile in Area 1; bottom: profile in Area 2.
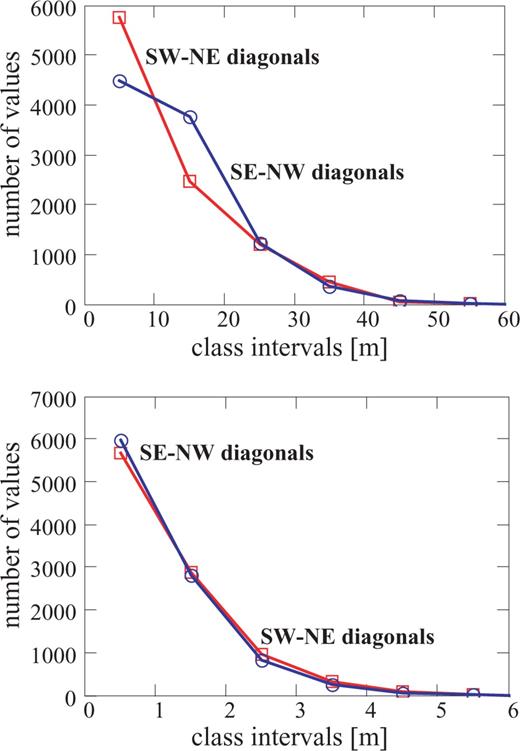
Histograms of height differences of diagonal endpoints for southwest–northeast and for southeast–northwest triangulations. The height differences are computed for a 100″× 100″ area centred on the point (28.3 arcmin) of the computation profile in Area 1 (top) and on (28.3 arcmin) in Area 2 (bottom).
Differences along the computation profile between gradients generated by triangulated prisms (southeast–northwest diagonals) and by rectangular prisms for Area 1 (top) and Area 2 (bottom).
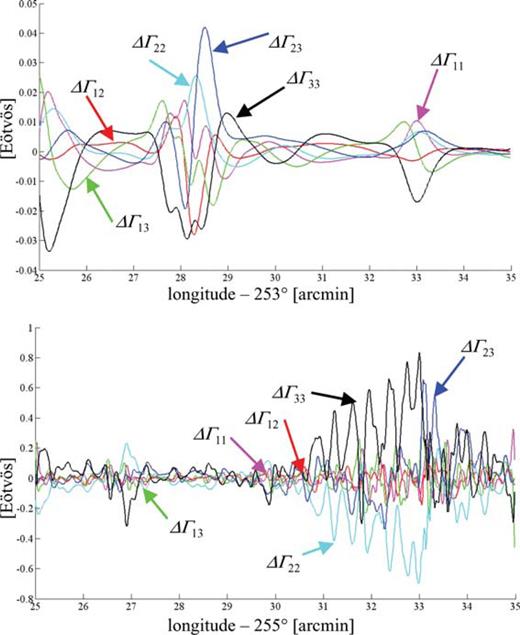
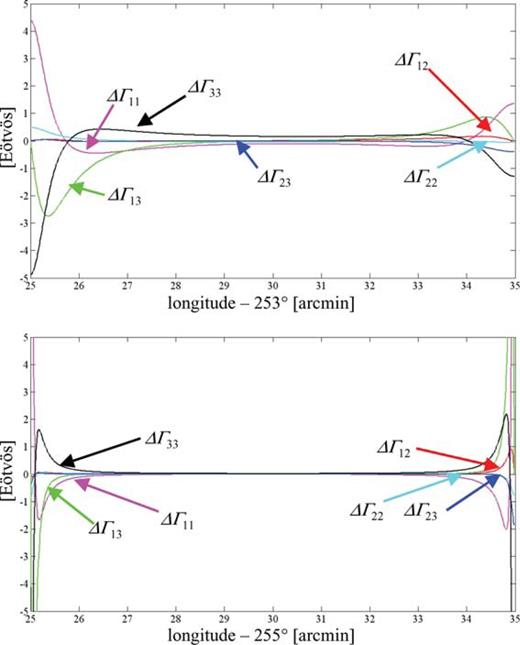
Fig. 8 shows differences between the rectangular numerical integration (eq. 13) and the gradients generated by the rectangular prisms (Areas 1 and 2). The differences in Area 2 are relatively larger because the computation profile is closer to the terrain. Differences between the rectangular and the triangular numerical integrations (eqs 13 and 14) are depicted in Fig. 9 and show that they are significant at the few-Eötvös level only near the edges of the integration areas. It is easy to show that the triangular numerical integration is (almost) independent of the orientation of the diagonals used in the triangulation (only the corner points of the overall rectangular area are weighted differently). Table 1 contains the statistics of the differences shown in Figs 7–9.
Differences along the computation profile between gradients generated by rectangular prisms and by the rectangular numerical integration for Area 1 (top) and Area 2 (bottom).
Differences along the computation profile between gradients computed by the rectangular and triangular numerical integration methods for Area 1 (top) and Area 2 (bottom).
![Statisticsa for the differences in gradients shown in Figs 7, 8 and 9. All units are Eötvös [E].](https://oup.silverchair-cdn.com/oup/backfile/Content_public/Journal/gji/166/3/10.1111/j.1365-246X.2006.03063.x/2/m_166-3-999-tbl001.jpeg?Expires=1750340717&Signature=xF4WLX2SzqTIf7BbJrMlBzGV8juzNSd7YxfjXnptX~dr4TNRl3E9x0KUBbzgF5ecpGt1ablsWcrTYfaKALHxDzJfGXID8M~2vOeTqI1zPZh43YtA-X13hBSIc9uScdc49w4CPoRafDFqFZDTvYoP82zLxqjjq66bG-a77OqWm7F5845xatwA~0GFdOVXW--h7rQZAtq00KSv7y07O4zj-W0EAdt~j3MSqJTFOdv~YqWLz2M-g0943u9FUlYxWKs7TKE-FutIW8AQQVNh4z3lyvSe2W6Qn0bu1ApkmtRq3eQ2VfcULTZ3qjkvafQTFrlG9pNeSYMjUna3YJMFSbe60Q__&Key-Pair-Id=APKAIE5G5CRDK6RD3PGA)
The prism methods and the numerical integrations could easily be adapted to generate the gradients at points with arbitrary altitudes above the topographic surface. The FFT models used here, on the other hand, require that all computation points reside at a constant altitude (and on a regular grid) above the entire terrain. The accuracy of these models may be assessed absolutely since in theory (if the series converges) the FFT method is identical to the rectangular numerical integration (provided the circular convolution error is eliminated (Jekeli 1998; Haagmans 1993), as done here). Fig. 10 compares Parker's FFT method, eq. (21), to the rectangular numerical integration model; while Forsberg's FFT method, eq. (26), is assessed similarly in Fig. 11. The critical parameter in these comparisons is the order of expansion of the series. Clearly, there is a direct correlation between the required order of expansion (for comparable accuracy) and the roughness of the terrain.
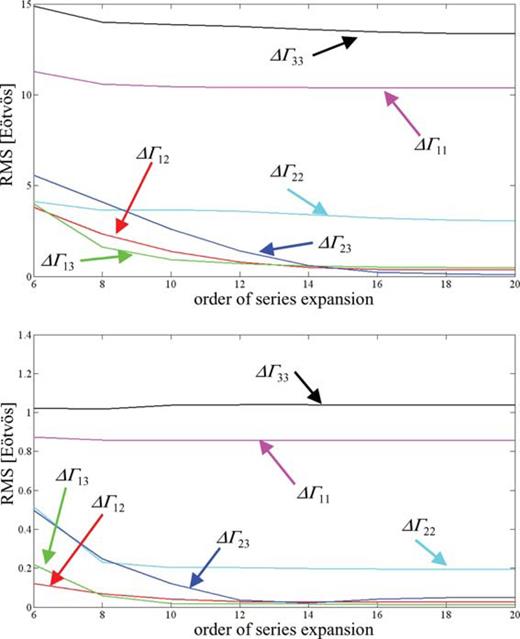
The rms of the differences between gradients computed by rectangular numerical integration and by Parker's FFT method, as a function of the order of the series expansion of the latter, for (top) Area 1 and (bottom) Area 2.
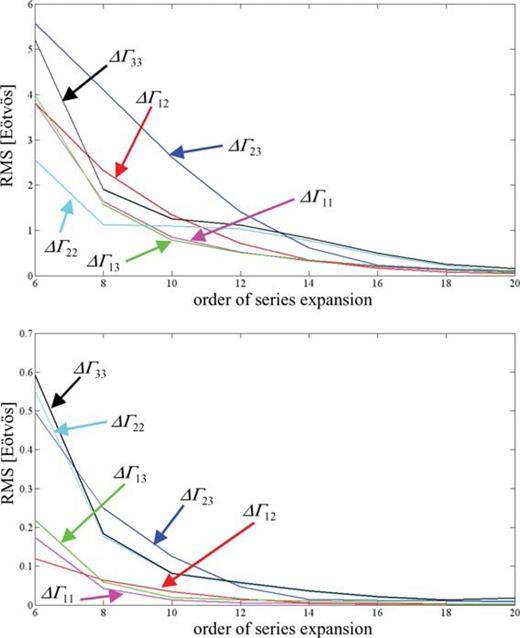
The rms of the differences between gradients computed by rectangular numerical integration and by Forsberg's FFT method, as function of the order of the series expansion of the latter, for (top) Area 1 and (bottom) Area 2.
Forsberg's FFT method converges as required to the rectangular numerical integration method (convergence at the very high orders of expansion may be compromised by computer round-off error). On the other hand, the diagonal (in-line) gradients computed by Parker's FFT method (and to a noticeable extent the off-diagonal gradients) fail to converge to those determined by the numerical integration. This is caused by the continuous, global Fourier transform embedded in the method that ultimately is applied to only discrete and locally extended data.
Finally, we show in Table 2 the computation times required for each type of model. Such comparisons are at best of relative value since they are specific to a computer platform (in this case, dual Intel Itanium 733 MHz processors with 4 Gbyte RAM). Furthermore, the computer code was not necessarily equally efficient for all models, and some adaptive methods could be implemented for the numerical integrations that take advantage of the diminishing contributions of distant zones. Clearly, however, the FFT methods, automatically yielding results for all points on the data grid, are orders of magnitude faster than any of the other methods (if the latter would be used to yield gradients on the entire grid, not just a profile).
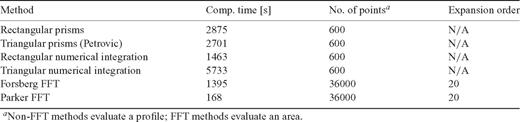
Computation times for various gradient models based on topographic mass sources.
5 Summary
A number of models can be used to represent the gravitational gradients generated by masses that are implied by topographic data. We investigated both finite element (fully analytic integration) methods as well as hybrid analytic/numerical integration of Newtonian potential integrals. The numerical integration can be facilitated by implementing discrete Fourier transforms of the elevation data, if these and the evaluation points are on a regular Cartesian grid. Different formulations have different requirements; most rely on a series expansion of the height.
For two test areas representing rough and moderate topographies, we analysed these methods for computation points along profiles at constant altitude (above all the terrain). We found only small differences in the gradients between rectangular and triangular numerical integration (≤0.33 E (rms) along the profile in Area 1; ≤0.05 E (rms) along the profile in Area 2; see Fig. 9). Triangulated finite element representations of the topographic masses, however, can generate significantly different gradients depending on the triangulation of the domain points (see Fig. 5). On the other hand, very small differences were found between the rectangular prism and the rectangular numerical integration methods (≤0.01 E (rms) along the profile in Area 1; ≤0.23 E (rms) along the closer profile in Area 2; see Fig. 8).
The FFT techniques ostensibly are faster, despite the many convolutions that are evaluated in the series expansion with respect to topographic heights. Two types of expansion were tested and the one by Parker (1972) was found to yield unacceptable biases (see Fig. 10) in the computed in-line gradients (compared to the rectangular integration method that it approximates). Both Tziavos (1988) and Schwarz (1990) also used the Parker FFT expansion, but were unaware of such biases since they made no comparison to the more rigorous rectangular numerical integration (or rectangular finite element method). For evaluation points close to rough terrain, quite high orders of expansion are required (14, in our case) to achieve sub-Eötvös accuracy with the alternative FFT method by Forsberg (1985); see Fig. 11.
Acknowledgments
This work was sponsored by the National Geospatial-Intelligence Agency under contract NMA401-02-1-2005. The authors are indebted to anonymous reviewers for helping to improve the manuscript.
References

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}